
Az enkóderek kulcsszerepet töltenek be a modern technológiában, gyakran észrevétlenül, mégis nélkülözhetetlenül. Alapvetően egy mechanikai mozgást alakítanak át elektromos jellé, amely feldolgozható, értelmezhető. Gondoljunk csak bele: a robotok precíz mozgásától kezdve, a CNC gépek pontos vágásáig, vagy akár a számítógépes egér kurzorának irányításáig mindenhol ott vannak.
Szerepük fontossága abban rejlik, hogy lehetővé teszik a visszacsatolást a vezérlőrendszerek számára. Ez a visszacsatolás elengedhetetlen a pontos pozicionáláshoz, sebességszabályozáshoz és általában a mozgás kontrollálásához. Nélkülük az automatizált rendszerek pontatlanok, megbízhatatlanok lennének, sőt, akár veszélyesek is.
Az enkóderek tehát a fizikai és a digitális világ közötti hídként funkcionálnak, lehetővé téve a mozgás pontos mérését és vezérlését, ami a modern automatizáció alapja.
A különböző típusú enkóderek (abszolút, inkrementális) különböző alkalmazásokhoz ideálisak. Az abszolút enkóderek például azonnali, egyértelmű információt adnak a pozícióról, míg az inkrementális enkóderek a relatív elmozdulást mérik, és egyszerűbb, olcsóbb megoldást jelentenek bizonyos esetekben. A megfelelő enkóder kiválasztása kritikus fontosságú a rendszer hatékony működése szempontjából.
A jövőben az enkóderek szerepe csak tovább fog nőni, ahogy az automatizáció és a robotika egyre inkább átszövi az életünket. A fejlődő technológiák, mint például az IoT (Internet of Things) és az ipari automatizálás (Industry 4.0) folyamatosan új felhasználási területeket nyitnak meg az enkóderek számára, növelve a pontosságukkal és megbízhatóságukkal szembeni elvárásokat.
Mi az az enkóder? Definíció, alapelvek és működési elv
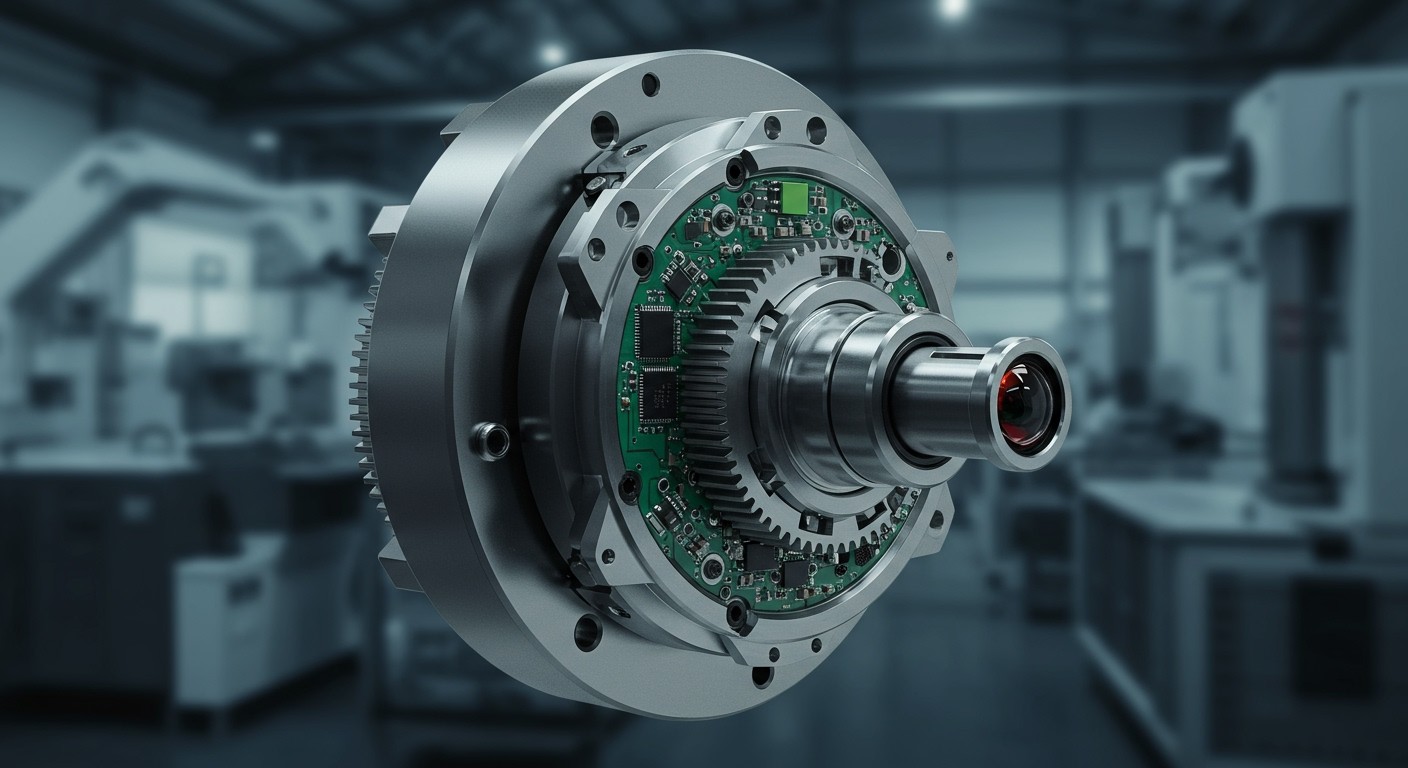
Az enkóder egy olyan elektromechanikus eszköz, mely egy mozgó alkatrész (általában forgó tengely) pozícióját vagy mozgását digitális jellé alakítja át. Más szavakkal, a forgást vagy lineáris mozgást elektromos jelekké kódolja, melyeket egy vezérlőrendszer (például egy mikrokontroller vagy PLC) képes értelmezni.
Működési elve alapvetően azon alapszik, hogy a tengelyen elhelyezett kódolt lemez vagy szalag optikai, mágneses vagy kapacitív érzékelőkkel kerül leolvasásra. Ez a lemez vagy szalag különböző mintákat tartalmaz, melyek a tengely pozíciójának egyedi azonosítói. A legelterjedtebb típusok az optikai enkóderek, ahol egy fényforrás (általában LED) világítja át a kódolt lemezt, és egy fotodetektor érzékeli a fény áthaladását. Ahol fény jut át, ott egy „1” érték adódik, ahol nem, ott egy „0”.
Az enkóderek két fő típusa létezik: abszolút és inkrementális enkóderek. Az abszolút enkóder a tengely minden egyes pozíciójához egyedi digitális kódot rendel. Ennek előnye, hogy áramszünet esetén sem veszíti el a pozíció információt, mivel a következő bekapcsoláskor azonnal leolvasható a pontos pozíció. Ezzel szemben az inkrementális enkóder csak a mozgás mértékét és irányát adja meg impulzusok formájában. A vezérlőrendszernek kell számolnia az impulzusokat, hogy meghatározza a pozíciót. Ez utóbbi egyszerűbb és olcsóbb, de áramszünet esetén elveszíti a pozíció információt, ezért szükség lehet egy kezdőpozícióba való visszatérésre (ún. „homing”).
Az enkóder lényegében egy érzékelő, amely a mozgást digitális adatokká alakítja, lehetővé téve a pontos pozícionálást és mozgásvezérlést.
Az enkóderek felbontása (resolution) azt mutatja meg, hogy egy teljes fordulatot hány részre oszt fel az enkóder. Minél nagyobb a felbontás, annál pontosabban mérhető a pozíció. A felbontást általában „impulzus per fordulat” (PPR – Pulses Per Revolution) vagy „bit” értékben adják meg.
Az enkóderek típusai: Abszolút vs. Inkrementális
Az enkóderek két fő típusa létezik: az abszolút és az inkrementális. A köztük lévő különbség alapvetően abban rejlik, hogy hogyan kódolják a pozíciót, és milyen információt adnak vissza a vezérlőrendszernek.
Az inkrementális enkóderek viszonylagos pozícióváltozást mérnek. Két (esetleg több) jelcsatornát (általában A és B) generálnak, amelyek impulzusokat adnak ki a tengely elfordulásakor. A két jel fáziseltolással rendelkezik egymáshoz képest (kvadratúrában vannak), ami lehetővé teszi az elfordulás irányának meghatározását. Az impulzusok számából és a fáziseltolásból lehet következtetni az elmozdulás mértékére és irányára. Az inkrementális enkóderek egyszerűbb felépítésűek és általában olcsóbbak, mint az abszolút enkóderek. Viszont nem adnak abszolút pozíciót, tehát áramszünet vagy újraindítás után elveszítik a pozícióinformációt, és újra kalibrálásra van szükségük.
Ezzel szemben az abszolút enkóderek a tengely minden egyes pozíciójához egyedi bináris kódot rendelnek. Ez azt jelenti, hogy az enkóder azonnal meg tudja adni a tengely abszolút pozícióját, bármikor is kérdezzük le. Az abszolút enkóderek általában bonyolultabb felépítésűek, több jelcsatornát használnak (pl. Gray-kód), és drágábbak, mint az inkrementális enkóderek. Azonban nem veszítenek pozíciót áramszünet esetén sem, és azonnal rendelkezésre áll a pontos pozícióinformáció az újraindítás után is.
A legfontosabb különbség tehát az, hogy az abszolút enkóderek abszolút pozíciót adnak, míg az inkrementális enkóderek csak a viszonylagos elmozdulást mérik.
Felhasználási területek tekintetében az inkrementális enkódereket gyakran használják olyan alkalmazásokban, ahol a pontos pozíció nem kritikus fontosságú, vagy ahol a rendszer képes a pozíciót rendszeresen kalibrálni. Ilyenek például a sebességmérés, a pozicionáló rendszerek (ahol a kezdeti kalibráció elvégezhető), vagy a nyomtatási rendszerek. Az abszolút enkóderek előnyösek olyan alkalmazásokban, ahol a pontos és megbízható pozícióinformáció elengedhetetlen, és ahol az áramszünet utáni gyors újraindulás fontos. Például robotkarok, CNC gépek, orvosi berendezések és légiközlekedési rendszerek.
A választás az enkóder típusa között a konkrét alkalmazás követelményeitől függ. Ha a költség fontos szempont, és a pozíció elvesztése nem jelent problémát, akkor az inkrementális enkóder a megfelelő választás. Ha viszont a pontosság, a megbízhatóság és az áramszünet utáni azonnali rendelkezésre állás fontos, akkor az abszolút enkóder a jobb megoldás.
Abszolút enkóderek részletesen: Kódolási módszerek és alkalmazások
Az abszolút enkóderek abban különböznek a relatív (inkrementális) enkóderektől, hogy közvetlenül megadják a tengely abszolút pozícióját. Ez azt jelenti, hogy áramkimaradás után, vagy a rendszer újraindításakor nem kell a referenciapontot megkeresni, azonnal tudjuk a pontos helyzetet. Ezt a képességüket különböző kódolási módszerekkel érik el.
A leggyakoribb kódolási módszer a Gray-kód használata. A Gray-kód lényege, hogy szomszédos pozíciók között csak egy bit változik, ami minimalizálja a hibákat a leolvasás során. Képzeljünk el egy tipikus bináris kódot: a 7-es (0111) után a 8-as (1000) következik. Itt egyszerre 4 bit változik, ami a leolvasás pillanatában átmeneti hibát okozhat. A Gray-kódban ez a probléma elkerülhető.
Egy másik elterjedt módszer a bináris kód közvetlen használata, de ehhez speciális leolvasó elektronikára van szükség a hibák kiküszöbölésére. Léteznek még különböző egyedi kódolások is, melyeket speciális alkalmazásokhoz terveznek.
Az abszolút enkóderek felhasználási területe rendkívül széleskörű. Alkalmazzák őket:
- Robotikában, ahol a robotkarok pontos pozícionálása elengedhetetlen.
- CNC gépekben, a szerszámok pontos vezérléséhez.
- Orvosi berendezésekben, ahol a beteg biztonsága érdekében a pontos pozíciómeghatározás kritikus.
- Szélkerekekben, a lapátok optimális szögének beállításához.
- Lift rendszerekben, a pontos szintmegálláshoz.
Az abszolút enkóderek alkalmazásakor figyelembe kell venni a felbontást (hány biten kódolja a pozíciót), a pontosságot, a működési hőmérséklet tartományt és a környezeti hatásokkal szembeni ellenállást (pl. por, nedvesség).
Az abszolút enkóderek kódolási módszereinek kiválasztásakor a legfontosabb szempont a pontosság, a megbízhatóság és a sebesség. A Gray-kód minimalizálja a hibákat, míg a bináris kód gyorsabb lehet, de érzékenyebb a zajra.
Gyakorlati alkalmazások során az abszolút enkódert mechanikusan a tengelyhez kell rögzíteni. Fontos a megfelelő illesztés és a rögzítés minősége, hogy a rezgések és a mechanikai terhelés ne befolyásolják a mérést. A jelkábelek árnyékolása is kritikus a zaj okozta hibák elkerülése érdekében. A vezérlőrendszer szoftverének megfelelően kell értelmeznie az enkóder által küldött adatokat, és a pozíciót valós fizikai mértékegységre kell konvertálnia (pl. mm, fok).
Összefoglalva, az abszolút enkóderek nélkülözhetetlenek a modern iparban, ahol a pontos és megbízható pozíciómeghatározás kulcsfontosságú. A megfelelő kódolási módszer és a gondos tervezés garantálja a rendszer optimális működését.
Inkrementális enkóderek részletesen: Fáziseltolás, felbontás és jelkezelés
Az inkrementális enkóderek a pozícióváltozást pulzusok formájában kódolják, ellentétben az abszolút enkóderekkel, amelyek egyedi kódot rendelnek minden pozícióhoz. Az inkrementális enkóderek működésének kulcseleme a fáziseltolás, amelyet általában A és B csatornák segítségével valósítanak meg. Ez a két jel egymáshoz képest 90 fokkal eltolva (kvadratúrában) helyezkedik el. Ennek köszönhetően nem csak a mozgás mértékét, hanem az irányát is meg tudjuk állapítani. Ha az A jel megelőzi a B jelet, az egyik irányba történő mozgást jelzi, míg a B jel előzése az ellenkező irányba mutat.
A felbontás az enkóder által egyetlen fordulat alatt generált pulzusok számát jelenti. Minél nagyobb a felbontás, annál pontosabban tudjuk meghatározni a pozícióváltozást. Például egy 1000 PPR (Pulses Per Revolution) enkóder egy fordulat alatt 1000 pulzust generál. A fáziseltolásnak köszönhetően azonban a felbontás quadratúra dekódolással akár négyszeresére is növelhető. Ez azt jelenti, hogy egy 1000 PPR enkóderrel elméletileg 4000 pozíciót tudunk megkülönböztetni egyetlen fordulat alatt.
A jelkezelés kritikus fontosságú a megbízható működéshez. Az enkóder jeleit gyakran zaj szűri, és digitalizálják a vezérlőrendszer számára. Fontos a megfelelő kábelezés és árnyékolás a zaj minimalizálása érdekében. Emellett a vezérlőrendszernek képesnek kell lennie a nagy frekvenciájú pulzusok pontos számlálására, különösen nagy sebességű alkalmazásokban. Gyakran használnak hardveres számlálókat a pulzusok rögzítésére, mivel ezek sokkal gyorsabbak és megbízhatóbbak, mint a szoftveres megoldások.
Az inkrementális enkóderek általában tartalmaznak egy harmadik, Z vagy index csatornát is. Ez a csatorna egyetlen pulzust generál minden fordulatnál, ami referencia pontként szolgál a pozíció meghatározásához. Bár az inkrementális enkóderek a bekapcsoláskor nem tudják a pontos pozíciót, a Z csatorna segítségével egy ismert pozícióhoz viszonyíthatjuk a mozgást.
Az inkrementális enkóderek fáziseltolásos A és B jelei, valamint opcionális Z (index) jele lehetővé teszik a mozgás irányának és relatív pozíciójának pontos meghatározását, valamint a referenciapont beállítását.
A jelkezelés során figyelembe kell venni a jittert is, ami a pulzusok időzítésében mutatkozó apró ingadozás. Ez pontatlansághoz vezethet a pozíció mérésében. A jitter csökkentése érdekében speciális szűrőket és algoritmusokat alkalmaznak.
Az enkóderek felbontása és pontossága: Mérés és optimalizálás
Az enkóderek felbontása és pontossága kritikus tényezők a legtöbb alkalmazásban. A felbontás azt mutatja meg, hogy egy teljes fordulatot hány egyedi pozícióra tud az enkóder felosztani. Minél nagyobb a felbontás, annál finomabb a pozícionálás. A pontosság viszont azt jelzi, hogy mennyire közel van a mért érték a valós értékhez. A kettő nem feltétlenül jár kéz a kézben: egy nagy felbontású enkóder lehet pontatlan, ha a jeladó elemei nem megfelelően vannak kalibrálva.
A felbontás mérése történhet oszcilloszkóppal, ahol a kimeneti jelek (A, B, Z impulzusok) sűrűségét vizsgáljuk egy teljes fordulat alatt. Speciális enkóder-tesztelő berendezések is léteznek, melyek automatikusan mérik a felbontást és a pontosságot, és részletes riportot készítenek. A pontosság méréséhez gyakran referencia-eszközt használnak, például egy nagy pontosságú forgóasztalt, melynek pozíciójához viszonyítják az enkóder által mért értéket.
Az enkóderek pontosságát számos tényező befolyásolhatja, többek között a hőmérséklet, a vibráció, a mágneses tér és a mechanikai illesztés pontatlansága. Ezért fontos a megfelelő enkóder kiválasztása az adott alkalmazáshoz, figyelembe véve a környezeti tényezőket. Például, egy precíziós CNC marógéphez nagy felbontású és nagy pontosságú enkóderre van szükség, míg egy egyszerű robotkarhoz elegendő lehet egy alacsonyabb felbontású, kevésbé pontos enkóder.
Az enkóder pontosságának optimalizálása érdekében elengedhetetlen a rendszeres kalibrálás és a megfelelő mechanikai illesztés biztosítása.
A felbontás növelése (például interpolációval) javíthatja a pozícionálás finomságát, de nem feltétlenül növeli a pontosságot. Az interpoláció során a meglévő jelek alapján számítanak ki további pozíciókat, ami növeli a felbontást, de a pontosságot a jel minősége és az interpolációs algoritmus befolyásolja.
Gyakorlati alkalmazásokban a felbontás és a pontosság közötti kompromisszumot kell megtalálni. A túl nagy felbontás feleslegesen növelheti a rendszer költségeit és a feldolgozási igényeket, míg a túl alacsony felbontás a kívánt teljesítmény romlásához vezethet.
Az enkóderek mechanikai felépítése és anyaghasználata
Az enkóderek mechanikai felépítése nagyban függ a felhasználási területtől és az elvárt pontosságtól. A leggyakoribb alkatrész a kódoló tárcsa, mely lehet üveg, műanyag vagy fém. Az üvegtárcsák a legpontosabbak, de sérülékenyebbek is, ezért precíziós alkalmazásokban használják, például mérőgépekben.
A műanyag tárcsák olcsóbbak és robusztusabbak, de kevésbé pontosak. Gyakran alkalmazzák őket ipari környezetben, ahol a pontosság nem kritikus tényező. A fémtárcsák a kettő között helyezkednek el, jó kompromisszumot kínálva a pontosság és a tartósság között. Rozsdamentes acél és alumínium a leggyakrabban használt fémek.
Az enkóder házának anyaga szintén kulcsfontosságú a tartósság szempontjából. Az ipari enkóderek gyakran alumíniumból vagy rozsdamentes acélból készülnek, hogy ellenálljanak a zord környezeti hatásoknak, mint a por, a nedvesség és a vibráció.
A tengely anyaga és csapágyazása befolyásolja az enkóder élettartamát és a mérési pontosságot. A jó minőségű csapágyak, például a golyóscsapágyak, simább forgást és kisebb kopást biztosítanak. A tengely általában edzett acélból készül, hogy ellenálljon a terhelésnek és a kopásnak.
A tömítések is fontos szerepet játszanak a mechanikai védelemben. Megakadályozzák a szennyeződések bejutását az enkóder belsejébe, ezzel növelve az élettartamot és a megbízhatóságot. A tömítések anyaga lehet gumi vagy szilikon, a felhasználási környezettől függően.
Optikai enkóderek: Működési elv, előnyök és hátrányok
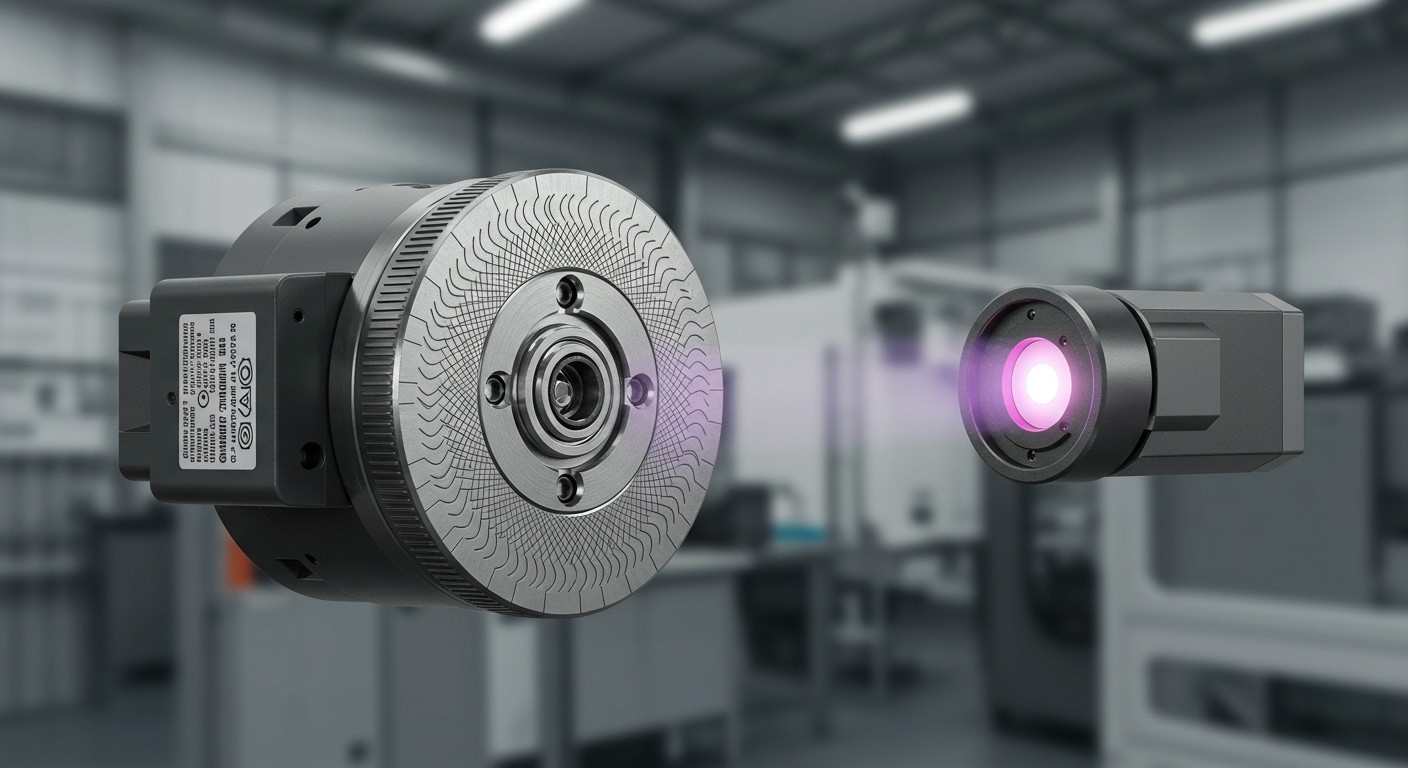
Az optikai enkóderek működése azon alapul, hogy egy forgó tárcsán elhelyezett, szabályos mintázatú átlátszó és átlátszatlan területeken áthaladó fény mennyiségét érzékelik. A tárcsa forgásával a fény egy optikai szenzorra esik, ami a fény intenzitásának változását elektromos jelekké alakítja. Ezek a jelek aztán dekódolásra kerülnek, hogy meghatározzák a pozíciót, sebességet vagy irányt.
Az optikai enkóderek jelentős előnye a magas felbontás, ami precíz pozícionálást tesz lehetővé. Emellett érzéketlenek a mágneses mezőkre, így alkalmasak olyan környezetekben, ahol elektromágneses interferencia léphet fel. A kopásmentes működés is egy fontos előny, mivel a fény érzékelése nem igényli a fizikai érintkezést.
Ugyanakkor az optikai enkódereknek vannak hátrányai is. Az egyik legfontosabb, hogy érzékenyek a szennyeződésekre, mint például a por vagy a zsír, ami befolyásolhatja a fény útját és pontatlan méréseket eredményezhet. Továbbá, a tárcsa sérülése vagy a fényforrás meghibásodása is a működés leállásához vezethet.
A fő hátrányuk az, hogy a pontosságuk nagyban függ a környezeti tényezőktől, különösen a szennyeződésektől, ami rendszeres karbantartást igényel.
A felhasználási területeik rendkívül széleskörűek. Megtalálhatóak a robotikában, ahol a robotkarok pontos mozgatásához szükségesek, a CNC gépekben a precíz alkatrészgyártáshoz, valamint a nyomdaiparban a papír adagolásának pontos szabályozásához. Emellett használják őket szervomotorokban, mérőeszközökben és orvosi berendezésekben is.
A gyakorlati alkalmazások során fontos figyelembe venni az adott környezet sajátosságait. Például, egy poros gyárban érdemes lehet a zárt, védett kivitelű optikai enkódereket alkalmazni, hogy minimalizáljuk a szennyeződések hatását. A megfelelő típus kiválasztása és a rendszeres karbantartás kulcsfontosságú a megbízható működéshez.
Mágneses enkóderek: Működési elv, robusztusság és alkalmazási területek
A mágneses enkóderek a tengely pozíciójának meghatározására mágneses mezőket használnak. Működési elvük egyszerű: egy mágnes (vagy mágnesek) forog a tengellyel együtt, és a mágneses mező változásait érzékelik a szenzorok. Ezek a szenzorok (például Hall-elemek) a mágneses mező erősségét elektromos jellé alakítják, amelyet aztán az elektronika feldolgoz pozícióadatokká.
A mágneses enkóderek kiemelkedő robusztusságukról ismertek. Nem érzékenyek a porra, szennyeződésekre, olajra vagy nedvességre, így ideálisak nehéz ipari környezetekben, ahol az optikai enkóderek könnyen meghibásodhatnak.
A mágneses enkóderek egyik legfontosabb előnye a megbízhatóságuk zord körülmények között is, ami kritikus fontosságúvá teszi őket például bányászati gépekben, építőipari berendezésekben és szélenergia-ipari alkalmazásokban.
Felhasználási területeik rendkívül széleskörűek:
- Ipari automatizálás: robotok pozícionálása, szerszámgépek vezérlése.
- Autóipar: kormányművek, motorvezérlés.
- Szélenergia: szélturbinák lapátjainak állítgatása.
- Bányászat: szállítószalagok és egyéb gépek felügyelete.
Bár a mágneses enkóderek általában alacsonyabb felbontást kínálnak, mint az optikai enkóderek, a legtöbb ipari alkalmazás számára ez nem jelent problémát. A megbízhatóság és a strapabíróság sok esetben felülírja a magasabb felbontás iránti igényt.
Kapacitív enkóderek: Működési elv, pontosság és érzékenység
A kapacitív enkóderek a pozíció meghatározására a kapacitás változását használják fel. Alapelvük, hogy egy forgó vagy lineáris mozgó alkatrész (pl. egy tárcsa) megváltoztatja két vagy több elektróda közötti kapacitást. Ez a kapacitásváltozás aztán elektronikusan feldolgozható, így a mozgás pontos pozíciója meghatározható.
A pontosság szempontjából a kapacitív enkóderek nagyon érzékenyek a környezeti tényezőkre, mint például a hőmérsékletre és a páratartalomra. Ezért a tervezés során nagy figyelmet kell fordítani a kompenzációs mechanizmusokra. A pontosságot befolyásolja továbbá az elektródák geometriájának pontossága és a feldolgozó elektronika minősége.
A kapacitív enkóderek egyik legnagyobb előnye a nagy felbontás és a kopásmentes működés, mivel nincs fizikai kontaktus a mozgó és a rögzített alkatrészek között.
Az érzékenységük miatt a kapacitív enkódereket gyakran használják olyan alkalmazásokban, ahol a kis méret és a magas pontosság fontos, például precíziós mérőeszközökben, robottechnikában és orvosi berendezésekben. Fontos megjegyezni, hogy a megfelelő árnyékolás és a stabil tápellátás elengedhetetlen a megbízható működéshez.
Enkóderek kiválasztása: Szempontok és kritériumok
Az enkóder kiválasztása kritikus lépés egy automatizálási rendszer tervezésekor. Számos tényezőt kell figyelembe venni a megfelelő eszköz megtalálásához.
Az elsődleges szempont a felbontás. Minél nagyobb a felbontás (pl. impulzusok száma per fordulat), annál pontosabb pozícióinformációt kapunk. A szükséges felbontás függ a konkrét alkalmazástól: egy robotkar vezérléséhez nagyobb felbontás szükséges, mint egy egyszerű szállítószalag sebességének méréséhez.
Fontos az enkóder típusa is. Abszolút enkóderek esetén a pozíció egyértelműen meghatározható az enkóder tápellátásának bekapcsolásakor is, ami előnyös, ha a rendszernek meg kell őriznie a pozíciót áramszünet esetén. Inkrementális enkóderek egyszerűbbek és olcsóbbak, de szükségük van egy referencia pontra a pozíció meghatározásához.
A környezeti tényezők szintén meghatározóak. Ha az enkóder extrém hőmérsékletnek, vibrációnak vagy pornak van kitéve, akkor egy robusztusabb, ipari minőségű enkódert kell választani. A védettségi fokozat (IP besorolás) is fontos szempont lehet.
A kommunikációs interfész (pl. SSI, Ethernet/IP, Profinet) kiválasztása kulcsfontosságú a vezérlőrendszerrel való kompatibilitás biztosításához.
Végül, de nem utolsósorban, az ár is fontos tényező. Azonban nem szabad kizárólag az árat figyelembe venni, mert egy olcsóbb, de nem megfelelő enkóder hosszú távon drágább lehet a meghibásodások és a pontatlan működés miatt.
Összefoglalva, az enkóder kiválasztása egy komplex folyamat, amely a műszaki követelmények, a környezeti feltételek és a költségvetés gondos mérlegelését igényli. A megfelelő enkóder kiválasztásával biztosítható a rendszer megbízható és pontos működése.
Enkóderek ipari alkalmazásai: Robotika, automatizálás és CNC gépek
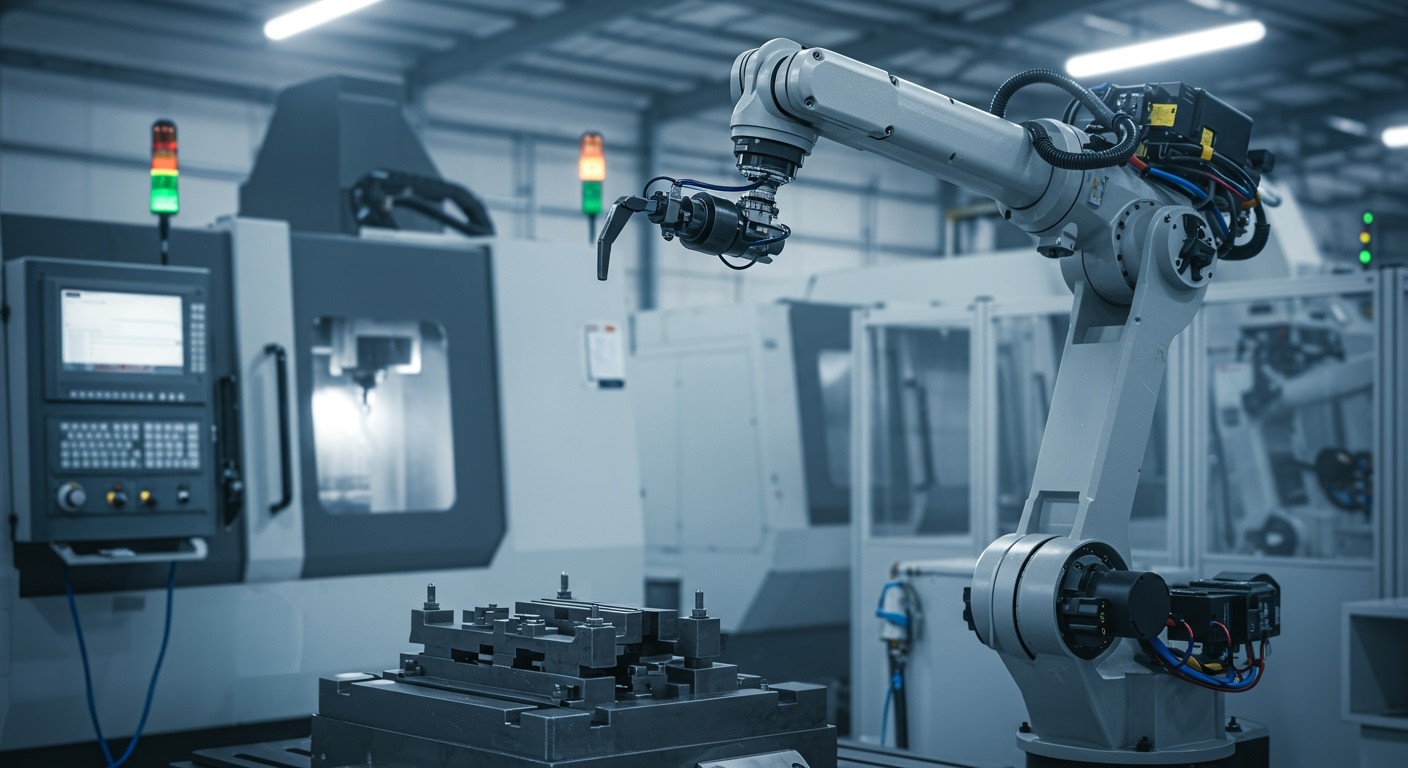
Az enkóderek nélkülözhetetlen elemei a modern iparnak, különösen a robotikában, az automatizálásban és a CNC gépekben. Ezeken a területeken a pontos pozíciómeghatározás és mozgásvezérlés elengedhetetlen a hatékony és pontos munkavégzéshez.
A robotikában az enkóderek a robotkarok ízületeiben találhatóak, lehetővé téve a robot számára, hogy pontosan tudja, milyen szögben állnak az ízületei. Ez kritikus fontosságú a precíz mozgásokhoz, mint például a tárgyak felvétele és lerakása, vagy a hegesztés és festés. A robot vezérlőrendszere az enkóderek jelei alapján folyamatosan korrigálja a motorok működését, biztosítva a kívánt pályán való mozgást.
Az automatizálási rendszerekben az enkóderek a futószalagok, szállítószalagok és egyéb mozgó alkatrészek helyzetének és sebességének mérésére szolgálnak. Például egy palackozó üzemben az enkóder segítségével lehet pontosan időzíteni a palackok töltését és címkézését. Az enkóderek itt a folyamatok szinkronizálásában és a hibák minimalizálásában játszanak kulcsszerepet.
A CNC gépekben az enkóderek a szerszámgépek tengelyeinek pozícióját mérik. Ez lehetővé teszi a gép számára, hogy rendkívül pontosan formálja a munkadarabot. Az enkóderek jelei alapján a CNC vezérlőrendszere képes a szerszámot a kívánt pályán mozgatni, így bonyolult geometriájú alkatrészek is gyárthatók nagy pontossággal. A pontosság itt kritikus, hiszen a legkisebb eltérés is elfogadhatatlan minőségi hibához vezethet.
Az enkóderek ipari alkalmazásainak központi eleme a zárt hurkú vezérlés, ahol az enkóder által mért pozíciót folyamatosan összehasonlítják a kívánt pozícióval, és a különbség alapján korrigálják a motorvezérlést.
Az enkóderek típusai (abszolút és inkrementális) különböző előnyöket kínálnak az ipari alkalmazásokban. Az abszolút enkóderek a pozíciót egyedi kóddal jelzik, így áramszünet esetén sem veszik el az információt. Az inkrementális enkóderek pedig egyszerűbbek és költséghatékonyabbak, de szükség van egy referencia pontra a pozíció meghatározásához.
Összességében az enkóderek nélkülözhetetlen alkatrészek a modern ipari automatizálásban, lehetővé téve a precíz mozgásvezérlést és a hatékony munkavégzést. A robotika, az automatizálás és a CNC gépek területén a pontosság, a megbízhatóság és a sebesség növeléséhez járulnak hozzá.
Enkóderek a járműiparban: ABS, ESP és motorvezérlés
Az enkóderek a járműiparban kulcsszerepet játszanak a biztonsági rendszerek és a motorvezérlés hatékony működésében. Gondoljunk csak az ABS (blokkolásgátló fékrendszer) működésére. Itt az enkóderek a kerekek forgási sebességét mérik, lehetővé téve a vezérlőegység számára, hogy érzékelje, mikor kezd blokkolni egy kerék. Ekkor a rendszer csökkenti a fékerőt az adott keréken, megakadályozva a blokkolást és biztosítva a kormányozhatóságot.
Az ESP (elektronikus stabilitásprogram) még tovább megy. Az ABS-hez hasonlóan itt is keréksebesség-enkódereket használnak, de kiegészülve kormánykerék-pozíció érzékelőkkel és fordulási sebesség szenzorokkal. Az ESP folyamatosan összehasonlítja a jármű tényleges mozgását a vezető által szándékozott mozgással. Ha eltérést észlel, például megcsúszást, akkor a rendszer célzottan fékezi az egyes kerekeket, vagy csökkenti a motor teljesítményét, hogy a jármű visszanyerje a stabilitását.
A motorvezérlésben az enkóderek a főtengely és a vezérműtengely pozícióját figyelik. Ez elengedhetetlen a pontos gyújtásidőzítéshez és üzemanyag-befecskendezéshez, ami optimalizálja a motor teljesítményét, csökkenti a károsanyag-kibocsátást és javítja az üzemanyag-fogyasztást. Pontatlan enkóder adatok hibás motor működéshez, teljesítményvesztéshez, vagy akár motor károsodáshoz vezethetnek.
A járműipari enkóderek robusztusak és megbízhatóak kell, hogy legyenek, mivel extrém körülményeknek – hőmérséklet-ingadozásnak, vibrációnak, szennyeződésnek – vannak kitéve.
A modern autókban a biztonsági és vezérlőrendszerek komplexitása miatt az enkóderek egyre fontosabb szerepet töltenek be. A pontos és megbízható adatok biztosítják a rendszerek hatékony működését, növelve a jármű biztonságát és teljesítményét.
Enkóderek az orvosi technológiában: Diagnosztikai eszközök és sebészeti robotok
Az orvosi technológiában az enkóderek kulcsfontosságú szerepet játszanak a pontos és megbízható pozicionálásban. Képalkotó diagnosztikai eszközök, mint például a CT és MRI gépek, enkódereket használnak a páciens pozicionálására és a szkennelési folyamat koordinálására. A forgó alkatrészek precíz mozgásának szabályozása elengedhetetlen a tiszta és használható képek elkészítéséhez.
Sebészeti robotok esetében az enkóderek még kritikusabbak. Ezek a robotok minimálisan invazív eljárásokat tesznek lehetővé, ahol a sebész távolról irányítja a robotkarokat. Az enkóderek folyamatosan visszajelzést adnak a robotkarok pozíciójáról és mozgásáról, lehetővé téve a sebész számára a milliméteres pontosságú beavatkozást.
Az enkóderek nélkülözhetetlenek a sebészeti robotok biztonságos és hatékony működéséhez, mivel biztosítják a precíz mozgásvezérlést és a pontos visszajelzést a sebész számára.
Például, egy laparoszkópos műtét során az enkóderek segítségével a robotkarok a hasüregben navigálnak, elkerülve a sérüléseket és biztosítva a célzott terület elérését. A robot által végzett mozgások pontossága közvetlenül befolyásolja a műtét sikerességét és a beteg gyógyulási idejét.
Enkóderek a megújuló energia szektorban: Szélenergia és napkövető rendszerek
A megújuló energia szektorban az enkóderek kulcsszerepet játszanak a hatékonyság növelésében és a megbízhatóság biztosításában, különösen a szélenergia és a napkövető rendszerek területén.
A szélenergia esetében az enkóderek a szélturbinák lapátjainak dőlésszögét (pitch control) szabályozzák. Ez elengedhetetlen a maximális energiatermeléshez, miközben védi a turbinát a túlzott szélterheléstől. Az enkóderek pontos visszajelzést adnak a vezérlőrendszernek, lehetővé téve a lapátok szögének finomhangolását a pillanatnyi szélviszonyoknak megfelelően. Ezenkívül, a generátor forgásának pontos mérésére is használják őket, ami a termelt energia mennyiségének optimalizálásához szükséges.
A napkövető rendszerek célja, hogy a napelemeket a nap mozgásához igazítsák, maximalizálva a napsugárzás beesési szögét és ezáltal az energiatermelést. Ehhez enkóderekre van szükség, melyek a rendszer mozgásának pontos irányítását és pozícionálását biztosítják. Egy- és kéttengelyű napkövető rendszerek is használnak enkódereket, attól függően, hogy a napot csak vízszintesen, vagy vízszintesen és függőlegesen is követik.
A napkövető rendszerekben alkalmazott enkóderek kulcsfontosságúak a rendszer hatékony működéséhez, hiszen a napelemek optimális pozícionálása közvetlenül befolyásolja az energiatermelést.
A környezeti hatások, mint például a hőmérsékletváltozások, a por és a páratartalom, komoly kihívások elé állítják az enkódereket. Ezért ezekben az alkalmazásokban gyakran robosztus, ipari minőségű enkódereket használnak, melyek képesek ellenállni a szélsőséges körülményeknek és hosszú távon is megbízhatóan működnek.
Enkóderek a háztartási gépekben: Mosógépek, mosogatógépek és robotporszívók

A háztartási gépekben az enkóderek kulcsszerepet játszanak a precíz mozgásvezérlésben. A mosógépekben például az enkóder figyeli a dob forgási sebességét és pozícióját, lehetővé téve a különböző mosási programok pontos végrehajtását. Ezzel biztosítható a ruhák megfelelő tisztítása és a gép hatékony működése.
A mosogatógépeknél az enkóderek a szórókarok forgási sebességének és pozíciójának szabályozásában segítenek. Ez elengedhetetlen a víz egyenletes elosztásához és a hatékony mosogatáshoz.
A robotporszívókban az enkóderek a kerekek forgásának monitorozásával biztosítják a pontos navigációt és a hatékony takarítást. A megtett távolság és a fordulási szög pontos mérésével a robot képes feltérképezni a környezetét és optimalizálni a takarítási útvonalát.
A szervo motorok használata elterjedt, melyekbe integrált enkóderek biztosítják a visszacsatolást a vezérlőrendszer számára, így a mozgás rendkívül pontos és szabályozott lehet. A modern háztartási gépekben egyre több enkódert alkalmaznak a teljesítmény növelése és a felhasználói élmény javítása érdekében.
Enkóderek jelének feldolgozása: Számítókártyák és mikrokontrollerek
Az enkóder jelek feldolgozása kritikus fontosságú a pozíció és sebesség pontos meghatározásához. A számítókártyák és mikrokontrollerek kiválóan alkalmasak erre a feladatra, hiszen képesek a gyors és pontos jelértelmezésre. A mikrokontrollerek, mint például az Arduino vagy STM32, beépített perifériákkal rendelkeznek, amelyek kifejezetten enkóder jelek fogadására lettek tervezve. Ezek a perifériák, gyakran kvadratúra dekódolóként emlegetik őket, automatikusan értelmezik az A és B fázisjeleket, így minimalizálva a processzor terhelését.
A számítókártyák, mint például a Raspberry Pi, bár nem rendelkeznek ilyen beépített funkciókkal, szoftveres megoldásokkal könnyedén kezelhetik az enkóder jeleket. Ehhez általában megszakítás-vezérelt rutinokat alkalmaznak, melyek a jelváltozásokra azonnal reagálnak. Fontos megjegyezni, hogy a szoftveres megoldásoknál a processzor terhelése nagyobb lehet, ezért a mikrokontrollerek gyakran előnyösebbek a valós idejű alkalmazásokban.
A lényeg, hogy a választott platform (számítókártya vagy mikrokontroller) képességeit és az alkalmazás követelményeit figyelembe véve kell a jel feldolgozási módszert kiválasztani.
A feldolgozott adatok alapján a mikrokontroller vagy a számítókártya képes irányítani motorokat, robotkarokat, vagy bármilyen más eszközt, amely pontos pozícionálást igényel. A kapott pozíció- és sebesség információkat továbbá felhasználhatjuk a rendszer állapotának monitorozására és szabályozására is.
Enkóder interfészek: SSI, BiSS, EnDat és EtherCAT
Az enkóderek világa nem lenne teljes a megfelelő interfészek nélkül. Ezek az interfészek biztosítják az enkóder által mért adatok megbízható és gyors továbbítását a vezérlőrendszer felé. Négy elterjedt interfész a SSI (Synchronous Serial Interface), BiSS (Bidirectional Serial Synchronous), EnDat (Encoder Data) és az EtherCAT (Ethernet for Control Automation Technology).
Az SSI egy egyszerű, robusztus soros interfész, amelyet gyakran használnak ipari alkalmazásokban, ahol a költséghatékonyság fontos szempont. Bár egyszerű, a kommunikáció sebessége korlátozott lehet. Ezzel szemben a BiSS egy kétirányú, nyílt forráskódú interfész, amely nagyobb sebességet és rugalmasságot kínál, lehetővé téve az enkóder paraméterezését is.
Az EnDat egy szintén kétirányú interfész, amelyet kifejezetten a Heidenhain fejlesztett ki. Ez az interfész nem csak a pozícióadatokat képes továbbítani, hanem az enkóderrel kapcsolatos diagnosztikai adatokat is, ami segíthet a karbantartás optimalizálásában és a hibák gyors azonosításában. Az EnDat interfész nagy előnye a biztonsági funkciók támogatása.
Az EtherCAT egy valós idejű Ethernet-alapú kommunikációs protokoll, amelyet nagy teljesítményű alkalmazásokhoz terveztek. Lehetővé teszi az enkóder adatainak integrálását egy nagyobb hálózati rendszerbe, minimális késleltetéssel. Ez különösen fontos a szinkronizált mozgásvezérlésnél és a komplex automatizálási rendszereknél.
A megfelelő enkóder interfész kiválasztása kritikus fontosságú a rendszer teljesítménye és megbízhatósága szempontjából. A választás során figyelembe kell venni a kommunikációs sebességet, a szükséges funkciókat (pl. diagnosztika, biztonság), valamint a rendszer többi elemével való kompatibilitást.
Mindegyik interfésznek megvannak a maga előnyei és hátrányai, és a választás a konkrét alkalmazás követelményeitől függ. A költség, sebesség, funkcionalitás és a rendszer architektúrája mind befolyásolják a döntést.
Enkóder kábelezés és árnyékolás: A zajcsökkentés fontossága
Az enkóderek pontossága és megbízhatósága nagymértékben függ a kábelezés minőségétől és a megfelelő árnyékolástól. A zaj, különösen az elektromágneses interferencia (EMI), komoly problémákat okozhat, hibás pozícióadatokat eredményezve, vagy akár az enkóder kommunikációjának teljes leállását is kiválthatja.
A megfelelő kábel kiválasztása kritikus fontosságú. Használjunk kifejezetten enkóder kábeleket, amelyek árnyékoltak és alacsony kapacitásúak. Az árnyékolás célja, hogy megvédje a jelet a külső zajforrásoktól. Az árnyékolást mindkét végén megfelelően földelni kell, a vezérlőszekrényben és az enkódernél is, hogy hatékonyan elvezesse a zajt.
A zajcsökkentés elengedhetetlen a pontos és megbízható enkóder működéshez.
A kábel útvonalának megtervezésekor kerüljük a párhuzamos vezetést erősáramú kábelekkel. Ha ez elkerülhetetlen, használjunk minőségi, dupla árnyékolású kábelt. A csatlakozók minősége is számít; válasszunk robusztus, ipari minőségű csatlakozókat, amelyek biztosítják a jó kontaktust és az árnyékolás folytonosságát. A helytelenül földelt vagy sérült árnyékolás a zaj csökkentése helyett felerősítheti azt!
Gyakori problémák és hibaelhárítás az enkóderekkel kapcsolatban

Az enkóderekkel kapcsolatos problémák sokfélék lehetnek, a mechanikai hibáktól kezdve az elektromos zajig. Gyakori, hogy az enkóder pontatlan jelet ad, ami a pozíciómeghatározás hibájához vezethet. Ez leggyakrabban a szennyeződések (por, olaj) miatt alakul ki az optikai tárcsánál vagy a mágneses fejnél.
A hibaelhárítás során az első lépés mindig a kábelek és csatlakozók ellenőrzése. A laza vagy sérült kábelek szakadozott jelet okozhatnak. Emellett fontos megvizsgálni a tápfeszültséget, mert a nem megfelelő feszültség szintén befolyásolhatja az enkóder működését.
Gyakori probléma a zaj is. Ezt okozhatja elektromágneses interferencia (EMI) vagy földelési probléma. A zajszűrés és a megfelelő árnyékolás segíthet a probléma megoldásában.
A legfontosabb, hogy a hibaelhárítás során szisztematikusan járjunk el, és lépésről lépésre szűkítsük a lehetséges okokat.
Mechanikai hibák esetén, mint például a csapágyak kopása vagy a tengely elhajlása, gyakran az enkóder cseréje a legjobb megoldás. Ha az enkóder programozható, akkor a szoftveres beállítások ellenőrzése is elengedhetetlen.
Érdemes továbbá rendszeresen karbantartani az enkódereket, ami magában foglalja a tisztítást és a csatlakozók ellenőrzését. Ezzel jelentősen csökkenthető a meghibásodások kockázata.
Enkóderek kalibrálása és karbantartása: A hosszú élettartam biztosítása
Az enkóderek hosszú élettartamának kulcsa a rendszeres kalibrálás és karbantartás. A kalibrálás során ellenőrizzük, hogy az enkóder által szolgáltatott pozícióadatok pontosan megfelelnek-e a valós helyzetnek. Ehhez gyakran speciális mérőeszközökre és szoftverekre van szükség.
A karbantartás magában foglalja a rendszeres tisztítást, különösen a szennyezett környezetben működő enkóderek esetében. A por és szennyeződések befolyásolhatják az optikai érzékelők működését, ami pontatlanságokhoz vezethet.
Fontos továbbá a kábelek és csatlakozók ellenőrzése, mivel a laza vagy sérült vezetékek hibás jeleket okozhatnak. A mechanikai alkatrészek, például a csapágyak állapotát is rendszeresen vizsgálni kell.
A megelőző karbantartás a legköltséghatékonyabb módszer az enkóderek élettartamának meghosszabbítására és a váratlan leállások elkerülésére.
A kalibrálási és karbantartási ütemterv kialakításakor figyelembe kell venni az enkóder típusát, a működési környezetet és a felhasználás intenzitását. Gyártói ajánlásokat mindig tartsuk szem előtt!
Jövőbeli trendek az enkóder technológiában: Miniaturizálás és vezeték nélküli megoldások
Az enkóder technológia jövője egyértelműen a miniaturizálás és a vezeték nélküli megoldások felé mutat. A kisebb méretű enkóderek egyre nagyobb szerepet kapnak a robotikában, a hordozható eszközökben és az orvosi műszerekben, ahol a hely korlátozott. Ez a trend lehetővé teszi a komplexebb rendszerek integrálását kisebb térbe.
A vezeték nélküli enkóderek kiküszöbölik a kábelezés okozta problémákat, növelve a rendszerek megbízhatóságát és mobilitását. Képzeljük el a drónokat, ahol a pontos pozíciómérés kulcsfontosságú, vagy az ipari automatizálást, ahol a rugalmasság és a gyors telepítés elengedhetetlen.
A vezeték nélküli enkóderek elterjedése forradalmasítja az ipari automatizálást, lehetővé téve a gépek közötti zökkenőmentes kommunikációt és a valós idejű adatgyűjtést.
A fejlesztések nem csak a méretre és a vezeték nélküli kapcsolatra korlátozódnak. Az energiahatékonyság növelése is fontos szempont, különösen a hordozható alkalmazások esetében. Az új anyagok és gyártási technológiák, mint például a MEMS (Mikroelektromechanikai rendszerek), kulcsszerepet játszanak ebben a fejlődésben. A jövőben várhatóan megjelennek az okos enkóderek is, amelyek integráltan tartalmaznak szenzorokat és feldolgozó egységeket, így még több információt szolgáltatnak a rendszerről.

















