A kefe nélküli DC motorok (BLDC) egyre nagyobb teret hódítanak a modern technológiában. Ennek oka a hagyományos, kefés motorokhoz képest mutatott számos előnyük. Míg a kefés motorok mechanikus kommutátorral rendelkeznek, ami kopáshoz és karbantartáshoz vezet, a BLDC motorok elektronikus kommutációt használnak, ami megbízhatóbbá és tartósabbá teszi őket.
A BLDC motorok térhódítását elsősorban a hatékonyságuk és a hosszabb élettartamuk motiválja. Kevesebb energiát fogyasztanak ugyanazon teljesítmény leadásához, ami különösen fontos a hordozható eszközökben és az elektromos járművekben. A kefék hiánya csökkenti a karbantartási igényt és a zajszintet is.
A BLDC motorok terjedésének kulcsa a teljesítmény/méret arányuk javulása és az elektronikus vezérlők árainak csökkenése.
Ezen tényezők együttesen tették lehetővé, hogy a BLDC motorok ma már szinte minden területen megtalálhatóak, a háztartási gépektől kezdve az ipari robotokon át az űrhajózásig. A pontos vezérlésük és a széles fordulatszám-tartományuk pedig további előnyöket biztosítanak a felhasználók számára.
A BLDC motor alapvető működési elve: Az állórész és a forgórész kapcsolata
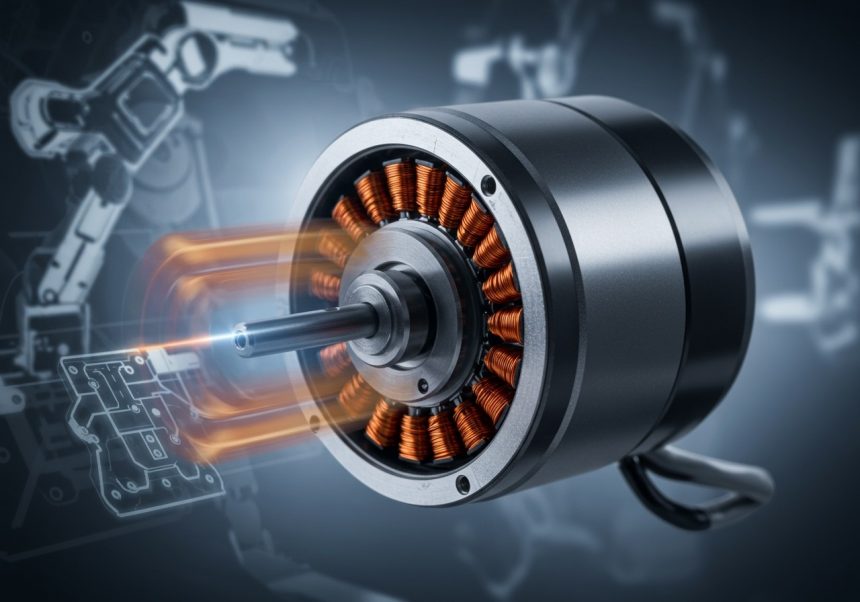
A kefe nélküli DC motor (BLDC) működésének alapja az állórész és a forgórész közötti elektromágneses kölcsönhatás. A hagyományos DC motorokkal ellentétben, a BLDC motorokban a tekercsek (armatúra) az állórészen helyezkednek el, míg a mágnesek a forgórészen találhatók. Ez a fordított elrendezés alapvetően befolyásolja a motor működését.
Az állórész tekercseinek árammal való táplálása forgó mágneses mezőt hoz létre. Ezt a mágneses mezőt elektronikus úton, egy vezérlőegység (inverter) segítségével szabályozzák. A vezérlőegység feladata, hogy a megfelelő tekercsekben a megfelelő pillanatban kapcsolja be az áramot, ezzel biztosítva a forgó mágneses mező folytonosságát és a forgórész mozgását.
A forgórészen elhelyezkedő permanens mágnesek igyekeznek a legkisebb energiájú állapotba kerülni, azaz a mágneses mező irányába fordulni. Mivel az állórész által generált mágneses mező folyamatosan forog, a forgórész mágneses pólusai követik azt, így a motor forogni kezd.
A BLDC motorokban nincs mechanikus kommutátor és kefék, ezért az állórész tekercseinek áramvezérlését elektronikus úton oldják meg, ami pontosabb vezérlést és hosszabb élettartamot tesz lehetővé.
A vezérlőegység a forgórész helyzetét szenzorok (pl. Hall-szenzorok) segítségével érzékeli. Ezek a szenzorok információt szolgáltatnak a mágneses pólusok pozíciójáról, ami alapján a vezérlőegység optimalizálja az állórész tekercseinek áramellátását. Ez a zárt hurkú vezérlés precíz fordulatszám-szabályozást és nagy hatásfokot eredményez.
Röviden összefoglalva: az állórész tekercsei generálják a forgó mágneses mezőt, a forgórész mágneses pólusai követik ezt a mezőt, és a vezérlőegység elektronikus úton szabályozza az áramellátást a szenzorok által szolgáltatott információk alapján.
A BLDC motor felépítése: Az állandó mágnesek és tekercsek elrendezése
A kefe nélküli DC motor (BLDC) felépítése alapvetően eltér a hagyományos, kefés DC motorokétól. A legfontosabb különbség az, hogy a BLDC motorokban a kommutátor és a kefék helyett elektronikus vezérlés valósítja meg a forgó mágneses mező létrehozását. Ez a konstrukció jelentősen megnöveli a motor élettartamát és csökkenti a karbantartási igényt.
A BLDC motorok felépítését tekintve két fő részből állnak: a forgórészből (rotor), amely általában állandó mágneseket tartalmaz, és az állórészből (stator), amely a tekercseket foglalja magában. Az állandó mágnesek a rotoron helyezkednek el, és polaritásuk (észak és dél) váltakozik. A mágnesek elrendezése befolyásolja a motor nyomatékát és sebességét. Gyakori elrendezés a radiális elrendezés, ahol a mágnesek a rotor kerületén helyezkednek el.
Az állórészben található tekercsek (vagy fázisok) háromfázisú elrendezésben helyezkednek el. Ezek a tekercsek kapják az elektronikus vezérlőegységtől az áramot, ami által forgó mágneses mezőt hoznak létre. A tekercsek geometriai elrendezése, a tekercselési séma, és a fázisok közötti eltolás mind meghatározza a motor teljesítményjellemzőit. A tekercsek vezérlésének precizitása kulcsfontosságú a motor hatékony működéséhez.
A BLDC motorok működési elvének lényege, hogy az elektronikus vezérlés a megfelelő tekercsek gerjesztésével folyamatosan “vonzza” vagy “taszítja” a rotoron lévő állandó mágneseket, így biztosítva a folyamatos forgást.
A tekercsek és mágnesek elrendezésének számos variációja létezik, melyek különböző alkalmazásokhoz optimalizáltak. Például léteznek olyan BLDC motorok, ahol a mágnesek a rotor belsejében helyezkednek el (belső rotoros motorok), míg más változatokban a tekercsek vannak belül (külső rotoros motorok). A választás függ a szükséges nyomatéktól, sebességtől, és a rendelkezésre álló helytől. Fontos megjegyezni, hogy a BLDC motorok hatékonysága nagymértékben függ a tekercsek és mágnesek precíz elhelyezésétől és a vezérlőelektronika minőségétől.
A kommutáció elektronikus vezérlése: Szenzoros és szenzor nélküli megoldások
A BLDC motorok hatékony működésének kulcsa a kommutáció elektronikus vezérlése. Ez azt jelenti, hogy a motor tekercseinek áramirányát elektronikus úton, és nem mechanikus kommutátorral változtatjuk meg. A kommutáció vezérlése két fő módszerrel valósulhat meg: szenzorokkal vagy szenzorok nélkül.
A szenzoros vezérlés (általában Hall-szenzorok) a forgórész pozíciójának közvetlen mérésén alapul. A Hall-szenzorok a motor állórészében helyezkednek el, és a forgórész mágneses terének változásait érzékelik. Ezek az információk elengedhetetlenek a motorvezérlő számára, hogy a megfelelő pillanatban kapcsolja be vagy ki a tekercseket, optimális nyomatékot biztosítva. A szenzoros vezérlés pontosabb és megbízhatóbb működést tesz lehetővé, különösen alacsony fordulatszámon és nagy terhelés mellett. Ugyanakkor a szenzorok beépítése növeli a motor költségét és komplexitását, valamint érzékenyebbé teheti a motort a környezeti hatásokra (pl. magas hőmérséklet, rezgés).
A szenzor nélküli vezérlés (sensorless control) a motor működési paramétereinek (pl. a tekercsekben indukálódó ellen-EMF, azaz visszaható elektromotoros erő) mérésén alapul. A motorvezérlő algoritmusok segítségével következtet a forgórész pozíciójára a mért adatokból. Ez a módszer olcsóbb és egyszerűbb motorokat eredményez, mivel nincs szükség szenzorokra. A szenzor nélküli vezérlés azonban általában kevésbé pontos, különösen alacsony fordulatszámon, ahol a visszaható elektromotoros erő nehezen mérhető. A motor indítása is problémásabb lehet, mivel a kezdeti pozíciót nehéz meghatározni. Azonban a modern mikrokontrollerek és kifinomult vezérlési algoritmusok lehetővé teszik a szenzor nélküli vezérlés hatékonyságának és megbízhatóságának jelentős javítását.
A szenzor nélküli vezérlés elterjedése a költséghatékonyságnak és a megbízhatóság javulásának köszönhető, így egyre több alkalmazásban váltja fel a szenzoros megoldásokat.
A választás a szenzoros és szenzor nélküli vezérlés között az adott alkalmazás követelményeitől függ. A kritikus alkalmazások, ahol a pontosság és a megbízhatóság a legfontosabb (pl. robotika, orvosi eszközök), általában a szenzoros vezérlést részesítik előnyben. Az olcsóbb és kevésbé kritikus alkalmazások (pl. háztartási gépek, ventilátorok) számára a szenzor nélküli vezérlés kínál ideális megoldást.
A szenzoros kommutáció: Hall-érzékelők szerepe és működése
A kefe nélküli DC motorok (BLDC) hatékony működésének kulcsa a megfelelő kommutáció, vagyis a tekercsek áramirányának helyes időzítése. A szenzoros kommutáció egyik legelterjedtebb módja a Hall-érzékelők használata.
A Hall-érzékelők apró, mágneses térre érzékeny eszközök, amelyeket a BLDC motor állórészében, a rotor pozíciójának közelében helyeznek el. Általában hármat alkalmaznak belőlük, 120 fokos eltolással. Amikor a rotor mágneses pólusa (északi vagy déli) elhalad egy Hall-érzékelő előtt, az érzékelő feszültséget generál, ami jelzi a vezérlőnek a rotor pozícióját. Ez az információ elengedhetetlen a következő tekercs bekapcsolásához.
A Hall-érzékelők kimeneti jelei binárisak, vagyis vagy magas (logikai 1) vagy alacsony (logikai 0) állapotban vannak. A három Hall-érzékelő kombinációja 8 különböző állapotot eredményezhet, de a BLDC motorok vezérléséhez általában csak 6 használatos, mivel a maradék kettő instabil állapotot jelent. Ezen állapotok mindegyike egy adott rotor pozícióhoz rendelhető, ami lehetővé teszi a vezérlő számára, hogy pontosan tudja, melyik tekercset kell bekapcsolnia a maximális nyomaték eléréséhez.
A Hall-érzékelők megbízható és pontos pozíció információt szolgáltatnak, ami elengedhetetlen a BLDC motor hatékony és sima működéséhez. Segítségükkel a motorvezérlő képes szinkronban tartani a tekercsek áramirányát a rotor forgásával, így biztosítva a folyamatos nyomatékot és a magas hatásfokot.
A Hall-érzékelők jelei közvetlenül befolyásolják a BLDC motor kommutációs szekvenciáját, meghatározva, hogy mely tekercsek legyenek aktiválva, és mikor.
A Hall-érzékelők használatának egyik hátránya a hozzájuk tartozó plusz kábelezés és az, hogy érzékenyek lehetnek a magas hőmérsékletre és a zajra. Mindazonáltal, a legtöbb alkalmazásban a megbízhatóságuk és pontosságuk felülmúlja ezeket a hátrányokat.
A szenzor nélküli kommutáció: Back-EMF és egyéb módszerek
A szenzor nélküli kommutáció a BLDC motorok vezérlésének egy kifinomult módja, mely kiküszöböli a hagyományos Hall-effektus szenzorok szükségességét. Ez csökkenti a költségeket, a méretet és növeli a megbízhatóságot azáltal, hogy kevesebb alkatrész van kitéve a meghibásodásnak.
A legelterjedtebb szenzor nélküli módszer a Back-EMF (visszaelektromotoros erő) érzékelés. Amikor egy BLDC motor tekercse nincs gerjesztve, a forgó mágneses mező által generált feszültség mérhető rajta. Ez a Back-EMF feszültség arányos a motor sebességével, és nullát keresztezési pontjai (zero-crossing points) információt szolgáltatnak a rotor pozíciójáról. A vezérlő ezeket az információkat használja a megfelelő tekercsek gerjesztéséhez, biztosítva a folyamatos forgást.
A Back-EMF érzékelésnek azonban van egy hátránya: alacsony sebességnél, vagy álló helyzetben a Back-EMF feszültség túl alacsony ahhoz, hogy megbízhatóan érzékelhető legyen. Emiatt a motor indításához gyakran speciális indítási algoritmusokra van szükség, melyek a tekercsek sorozatos gerjesztésével, vagy egyéb módszerekkel „lökik meg” a rotort.
A Back-EMF érzékelés alapelve, hogy a nem gerjesztett tekercsen indukálódó feszültség információt hordoz a rotor aktuális pozíciójáról, ami lehetővé teszi a megfelelő kommutációs sorrend meghatározását.
Egyéb szenzor nélküli módszerek is léteznek, például a tekercs indukciójának mérése, vagy a modell alapú becslés. A tekercs indukciójának mérése a tekercsek induktivitásának változását használja a rotor helyzetének meghatározására. A modell alapú becslés pedig a motor matematikai modelljét és a mért feszültség- és áramerősség adatokat használja a rotor pozíciójának becslésére. Ezek a módszerek általában komplexebb algoritmusokat igényelnek, de javíthatják a teljesítményt alacsony sebességnél és növelhetik a rendszer robusztusságát.
A szenzor nélküli kommutációt széles körben alkalmazzák olyan alkalmazásokban, ahol a költség, a méret és a megbízhatóság kritikus szempontok, például ventilátorokban, szivattyúkban, elektromos kerékpárokban és drónokban.
A BLDC motorok vezérlési módszerei: Feszültség-, áram- és térvektoros vezérlés
A BLDC motorok hatékony működésének kulcsa a megfelelő vezérlés. A legegyszerűbb megközelítésektől a kifinomult, nagy teljesítményű algoritmusokig számos vezérlési módszer létezik. Nézzük meg a három leggyakoribb módszert:
Feszültségvezérlés: Ez a legegyszerűbb módszer, ahol a motor feszültségét szabályozzuk. Általában PWM (Pulse Width Modulation) technikát alkalmaznak, melynek során a feszültség be- és kikapcsolási arányát változtatva szabályozzuk a motorra jutó átlagos feszültséget. Egyszerű felépítésű, olcsó, de kevésbé pontos és hatékony, mint a fejlettebb módszerek. A motor sebessége a feszültséggel arányos, de a terhelés változásával a sebesség is változik. Tipikusan kisebb teljesítményű, alacsony költségű alkalmazásokban használják, például egyszerű játékokban vagy ventilátorokban.
Áramvezérlés: Ebben az esetben a motor áramát szabályozzuk, ami közvetlenebb kapcsolatban áll a motor nyomatékával. Az áramvezérlés pontosabb sebesség- és nyomatékszabályozást tesz lehetővé, mint a feszültségvezérlés. A motor áramának mérésére és szabályozására áramérzékelőket és visszacsatolási hurkokat használnak. Az áramkorlátozás védelmet nyújt a motor számára a túlzott áramfelvétel ellen, ami károsíthatná a tekercseket. Az áramvezérlés alkalmazása bonyolultabb áramköröket és szoftvereket igényel, de jobb teljesítményt és hatékonyságot eredményez. Gyakran használják precíziós gépekben, szervomotorokban és robotikában.
Térvektoros vezérlés (FOC – Field Oriented Control): A legfejlettebb vezérlési módszer, melynek célja a BLDC motor viselkedésének DC motorhoz hasonlóvá tétele. A FOC a motor áramait két ortogonális komponensre bontja: egy nyomaték- (torque) és egy gerjesztési (flux) komponensre. Ezeket a komponenseket egymástól függetlenül szabályozva érhető el a pontos és gyors nyomatékszabályozás, valamint a magas hatékonyság. A FOC bonyolult matematikai transzformációkat (Clark és Park transzformációkat) használ, és nagy számítási kapacitást igényel.
A térvektoros vezérlés lehetővé teszi a motor maximális nyomatékának elérését minimális áramfelvétel mellett, ami a hatékonyság növekedéséhez vezet.
A FOC előnyei közé tartozik a kiváló dinamikus teljesítmény, a széles sebességtartományban történő stabil működés és a zajszint csökkentése. Alkalmazási területei közé tartoznak a nagypontosságú robotok, az elektromos járművek és a nagy teljesítményű ipari meghajtások.
Összefoglalva, a BLDC motorok vezérlése a legegyszerűbb feszültségvezérléstől a legbonyolultabb térvektoros vezérlésig terjed. A választott módszer a konkrét alkalmazás követelményeitől függ, figyelembe véve a költséget, a teljesítményt és a hatékonyságot.
A BLDC motorok előnyei a hagyományos DC motorokkal szemben: Hatékonyság, élettartam, zajszint

A kefe nélküli DC motorok (BLDC) számos előnnyel rendelkeznek a hagyományos, kefés DC motorokkal szemben, különösen a hatékonyság, élettartam és zajszint tekintetében. Ezek az előnyök teszik őket egyre népszerűbbé a különböző alkalmazásokban.
A hatékonyság tekintetében a BLDC motorok jelentősen felülmúlják a kefés motorokat. Ennek az az oka, hogy a kefés motorokban a kefék és a kommutátor közötti súrlódás hőveszteséget okoz, ami csökkenti a hatékonyságot. A BLDC motorokban nincsenek kefék, így ez a súrlódási veszteség megszűnik. Ráadásul a BLDC motorok elektronikus vezérlése lehetővé teszi a motor optimális működtetését, ami tovább növeli a hatékonyságot. Ez alacsonyabb energiafogyasztást és kevesebb hőtermelést jelent.
Az élettartam szempontjából a BLDC motorok szintén sokkal jobbak. A kefés motorokban a kefék kopnak, és időnként cserélni kell őket. Ez karbantartást igényel és leállást okozhat. A BLDC motorokban nincsenek kefék, így ez a probléma nem merül fel. Ezenkívül a BLDC motorok általában robusztusabb felépítésűek és jobban ellenállnak a környezeti hatásoknak, ami tovább növeli az élettartamukat.
A zajszint tekintetében is kedvezőbb a helyzet a BLDC motorok esetében. A kefés motorokban a kefék és a kommutátor közötti súrlódás zajt okoz. A BLDC motorokban ez a zajforrás hiányzik. Ezenkívül a BLDC motorok elektronikus vezérlése lehetővé teszi a simább és csendesebb működést. Ez különösen fontos olyan alkalmazásokban, ahol a zajszint korlátozott, például orvosi eszközökben vagy háztartási gépekben.
A BLDC motorok hatékonysága, hosszabb élettartama és alacsonyabb zajszintje jelentős előnyöket kínál a kefés DC motorokkal szemben, ami széles körű felhasználásukat teszi lehetővé.
Összességében a BLDC motorok egyértelműen jobbak a kefés motoroknál a hatékonyság, élettartam és zajszint szempontjából, bár általában drágábbak is. Azonban a hosszú távú előnyök, mint például a karbantartásmentesség és az alacsonyabb energiafogyasztás, gyakran ellensúlyozzák a magasabb kezdeti költségeket.
A BLDC motorok hátrányai: Költség és komplex vezérlés
Bár a BLDC motorok számos előnnyel rendelkeznek, fontos szem előtt tartani a hátrányaikat is. A legszembetűnőbb talán a magasabb költség. Ez elsősorban a bonyolultabb felépítésnek és a precízebb gyártási folyamatoknak köszönhető. A kefés motorokhoz képest a BLDC motorok előállítása drágább, ami a végtermék árában is megmutatkozik.
Egy másik jelentős hátrány a komplex vezérlés szükségessége. Míg a kefés motorok egyszerűen egyenárammal működtethetők, a BLDC motorokhoz elektronikus vezérlő áramkör szükséges. Ez az áramkör felelős a tekercsek megfelelő időben történő kapcsolásáért, ami a motor forgását eredményezi. A vezérlő áramkör tervezése és implementálása szakértelmet igényel, és további költségeket jelent.
A komplex vezérlés szükségessége nem csak költségnövelő tényező, hanem a rendszer meghibásodásának esélyét is növeli.
A vezérlő áramkörök emellett érzékenyebbek lehetnek a környezeti hatásokra, például a hőmérséklet-változásokra vagy a túlfeszültségre. Ezért a BLDC motorokat gyakran különleges védelemmel kell ellátni, ami tovább növeli a költségeket.
Összefoglalva, bár a BLDC motorok kiváló hatásfokkal és hosszú élettartammal rendelkeznek, a magasabb költség és a komplex vezérlés jelentős korlátot jelenthet bizonyos alkalmazásokban. A döntés során mérlegelni kell a költségeket és az előnyöket, hogy a legmegfelelőbb motor kerüljön kiválasztásra.
A BLDC motorok felhasználási területei: Ipari automatizálás
A BLDC motorok az ipari automatizálásban kulcsszerepet töltenek be, köszönhetően pontosságuknak, megbízhatóságuknak és hatékonyságuknak. Számos területen alkalmazzák őket, ahol a precíz mozgásirányítás elengedhetetlen.
Például, a robotikában a BLDC motorok hajtják a robotkarokat és a mozgató mechanizmusokat, lehetővé téve a nagypontosságú összeszerelést és a komplex feladatok végrehajtását. A CNC gépekben is előszeretettel használják őket, ahol a vágóeszközök és a munkadarabok pontos pozicionálása kritikus a minőségi termeléshez.
A gyártósorokon a BLDC motorok a szállítószalagok és a csomagoló gépek meghajtásában játszanak fontos szerepet. Ezekben az alkalmazásokban a motorok csendes működése és hosszú élettartama jelentős előnyt biztosít.
A BLDC motorok elterjedése az ipari automatizálásban nagymértékben hozzájárul a termelékenység növeléséhez, a hulladék csökkentéséhez és a munkafolyamatok optimalizálásához.
Ezen felül, a BLDC motorok alkalmasak a szervo rendszerek meghajtására is, amelyek a visszacsatolás segítségével rendkívül pontosan szabályozzák a mozgást. Ez különösen fontos az olyan alkalmazásokban, mint például a textiliparban használt nagy sebességű varrógépek, vagy az elektronikai iparban használt beültető gépek.
A BLDC motorok felhasználási területei: Elektromos járművek
A BLDC motorok forradalmasították az elektromos járművek (EV-k) piacát. Kompakt méretük, magas hatásfokuk és megbízhatóságuk ideálissá teszi őket a hajtásláncba való beépítésre. Legyen szó elektromos autóról, motorkerékpárról, robogóról vagy akár elektromos kerékpárról, a BLDC motorok biztosítják a szükséges teljesítményt és nyomatékot.
Az EV-kben a BLDC motorok közvetlenül hajtják a kerekeket, vagy egy sebességváltón keresztül adják le a teljesítményt. A jó hatásfok különösen fontos, mivel ez közvetlenül befolyásolja az EV hatótávolságát. Minél kevesebb energia vész el hő formájában, annál messzebbre jut az autó egy töltéssel. A BLDC motorok ezen a téren kiemelkedően teljesítenek a hagyományos motorokhoz képest.
A regeneratív fékezés egy másik fontos terület, ahol a BLDC motorok előnyt jelentenek. Fékezéskor a motor generátorként működik, visszatáplálva az energiát az akkumulátorba. Ez növeli a hatótávolságot és csökkenti a fékbetétek kopását.
A BLDC motorok használata az elektromos járművekben kulcsfontosságú a nagyobb hatótávolság, a jobb teljesítmény és a csökkentett karbantartási igény eléréséhez.
A BLDC motorok csendes működése szintén fontos szempont az EV-k esetében, hozzájárulva a kényelmesebb vezetési élményhez. A hagyományos belsőégésű motorok zajához képest az elektromos járművek szinte hangtalanok, ami a BLDC motoroknak köszönhető.
A jövőben a BLDC motorok még szélesebb körben fognak elterjedni az elektromos járművekben, ahogy a technológia tovább fejlődik és az akkumulátorok ára csökken. A fejlesztések célja a még nagyobb hatásfok, a kisebb méret és a nagyobb teljesítménysűrűség elérése.
A BLDC motorok felhasználási területei: Háztartási gépek

A BLDC motorok forradalmasították a háztartási gépek piacát. A hagyományos motorokhoz képest csendesebb működésük, hosszabb élettartamuk és jobb energiahatékonyságuk miatt egyre népszerűbbek.
Mosógépekben például a BLDC motorok precíz vezérlést tesznek lehetővé, ami optimalizálja a mosási ciklusokat és csökkenti a zajszintet. A hűtőszekrényekben a folyamatos, alacsony fordulatszámú működéshez ideálisak, minimalizálva az energiafogyasztást.
A porszívókban a BLDC motorok nagy teljesítményt és hatékony szívóerőt biztosítanak, miközben könnyűek és tartósak maradnak.
Emellett megtalálhatók szárítógépekben, mosogatógépekben és kisebb konyhai eszközökben, mint például turmixgépekben és robotgépekben is. A fokozott megbízhatóság és a karbantartásigény csökkenése mind a gyártók, mind a felhasználók számára előnyös.
A BLDC motorok felhasználási területei: Drónok és modellezés
A BLDC motorok forradalmasították a drónok és a modellezés világát. Kompakt méretük, nagy teljesítmény/súly arányuk és megbízhatóságuk ideálissá teszi őket ezekhez az alkalmazásokhoz.
A drónok esetében a BLDC motorok a rotorokat hajtják meg. A pontos sebességszabályozás, ami a BLDC motorok sajátossága, kulcsfontosságú a drónok stabil repüléséhez és manőverezéséhez. A hosszabb élettartam – a hagyományos kefés motorokhoz képest – csökkenti a karbantartási igényt és növeli a repülési időt.
A modellezésben, különösen a távirányítású (RC) autókban és repülőkben, a BLDC motorok a nagyobb sebességet és nyomatékot tesznek lehetővé. A hatékony energiafelhasználás hosszabb játékidőt eredményez, ami fontos szempont a hobbisták számára.
A BLDC motorok a drónok és modellek terén elért sikere nagyrészt a kefe nélküli kialakításuknak köszönhető, ami minimalizálja a súrlódást és a kopást, ezáltal maximalizálva a hatékonyságot és a teljesítményt.
A BLDC motorok használata a modellezésben és a drónokban folyamatosan terjed, köszönhetően a technológia fejlődésének és az árak csökkenésének. Ez a tendencia várhatóan folytatódik, ahogy a teljesítmény és a megbízhatóság iránti igény növekszik ezen a területen.
A BLDC motorok felhasználási területei: Orvosi eszközök
A kefe nélküli DC motorok (BLDC) elengedhetetlenek az orvosi eszközök területén, ahol a megbízhatóság és a pontosság kulcsfontosságú. Számos alkalmazásban találkozhatunk velük.
- Sebészeti robotok: A BLDC motorok precíz mozgást tesznek lehetővé, ami elengedhetetlen a bonyolult műtéteknél.
- Orvosi pumpák: Gyógyszerek, vér vagy más folyadékok adagolására használják őket, ahol a folyamatos és szabályozott áramlás kritikus.
- Diagnosztikai eszközök: MRI gépekben és egyéb képalkotó berendezésekben a precíz pozicionálást és a minimális zajszintet biztosítják.
A BLDC motorok sterilizálhatósága és alacsony karbantartási igénye miatt ideális választást jelentenek az orvosi környezetben, ahol a higiénia és a megbízható működés elsődleges szempont.
Ezeken felül, fogászati fúrókban, légzőkészülékekben és más, pontos és csendes működést igénylő eszközökben is gyakran alkalmazzák őket.

















