
Az elektromos motorok napjainkban szinte mindenhol jelen vannak, a háztartási gépektől kezdve az ipari robotokon át az elektromos autókig. Nélkülözhetetlen részei a modern technológiának, lehetővé téve az elektromos energia mechanikai energiává alakítását, ezáltal mozgást generálva.
Alapvetően az elektromágnesesség elvén működnek. Egy elektromos árammal átjárt vezető mágneses teret hoz létre maga körül. Ha ezt a vezetőt egy másik mágneses térbe helyezzük (például egy állandó mágnes által létrehozott térbe), akkor erő hat rá, ami mozgást eredményez. Az elektromos motorok ezt az elvet használják fel a forgómozgás létrehozására.
A motorok felépítése változatos lehet, de alapvetően két fő részből állnak: a rotor (forgó rész) és a sztátor (álló rész). A rotor általában tekercseket tartalmaz, melyeken áram folyik át, míg a sztátor mágneses teret hoz létre, vagy állandó mágnesekkel, vagy elektromágnesekkel. A rotor és a sztátor mágneses mezőinek kölcsönhatása hozza létre a forgatónyomatékot, ami a motort meghajtja.
Az elektromos motorok jelentősége abban rejlik, hogy hatékonyan és tisztán képesek az elektromos energiát mozgássá alakítani. A hatékonyságuk magas, ami azt jelenti, hogy kevés energia vész kárba hő formájában. Emellett, az elektromos motorok használata csökkenti a károsanyag-kibocsátást, különösen akkor, ha a felhasznált elektromos energia megújuló forrásokból származik.
Az elektromos motorok alapvető szerepet játszanak a modern társadalomban, lehetővé téve számos eszköz és rendszer működését, a közlekedéstől az ipari termelésig.
A különböző típusú elektromos motorok (például egyenáramú motorok, váltakozó áramú motorok, szinkron motorok, aszinkron motorok) más-más alkalmazásokra alkalmasak. A következőkben részletesebben is megvizsgáljuk ezeknek a motoroknak a működési elvét és technikai jellemzőit.
Az elektromágnesesség alapelvei: Az elektromos motorok működésének kulcsa
Az elektromos motorok működésének alapja az elektromágnesesség, vagyis az elektromos áram és a mágneses mező közötti kapcsolat. Ez a kapcsolat lehetővé teszi, hogy az elektromos energiát mechanikai energiává alakítsuk át, ami a motor forgómozgását eredményezi.
A motorokban található tekercsek, amikor áram folyik át rajtuk, mágneses mezőt hoznak létre. Ennek a mágneses mezőnek az iránya az áram irányától függ, amit a jobbkéz-szabály segítségével lehet meghatározni. Képzeljük el, hogy a jobb kezünkkel átfogjuk a tekercset úgy, hogy a hüvelykujjunk az áram irányába mutat. Ebben az esetben a többi ujjunk a mágneses mező irányát mutatja.
A motor belsejében található egy állandó mágnes (vagy egy másik elektromágnes), ami kölcsönhatásba lép a tekercsek által létrehozott mágneses mezővel. A két mágneses mező taszítja vagy vonzza egymást, attól függően, hogy azonos vagy ellentétes polaritásúak-e.
Ez az elektromágneses erő, a vonzás és taszítás kombinációja az, ami forgatja a motor tengelyét.
A motorok úgy vannak tervezve, hogy a tekercsek áramellátása folyamatosan változzon, így a mágneses mező is folyamatosan változik, ami biztosítja a folyamatos forgómozgást. Ezt a változást általában egy kommutátor és kefék segítségével érik el egyenáramú motorokban, vagy elektronikus vezérléssel váltóáramú motorokban.
A motor hatékonysága nagymértékben függ az elektromágneses mező erősségétől és a tekercsek kialakításától. A nagyobb áram erősebb mágneses mezőt eredményez, ami nagyobb nyomatékot és teljesítményt jelent. Azonban a túlzott áram hőtermeléssel is járhat, ami csökkentheti a motor élettartamát és hatékonyságát.
Fontos megjegyezni, hogy az elektromágnesesség elve nemcsak a motorok működését magyarázza, hanem számos más technológiai alkalmazás alapját is képezi, mint például a generátorok, transzformátorok és elektromágneses relék.
Az egyenáramú (DC) motorok felépítése és működése
Az egyenáramú (DC) motorok a legegyszerűbb elektromos motorok közé tartoznak, ezért ideális kiindulópontot jelentenek a motorok működésének megértéséhez. Alapvetően két fő részből állnak: a állórészből (sztátor) és a forgórészből (rotor vagy armatúra).
Az állórész egy vagy több állandó mágnest vagy elektromágnest tartalmaz. Ezek a mágnesek hozzák létre azt a mágneses teret, amely a motor működésének alapja. Az elektromágneses állórész tekercsekből áll, melyeket árammal átjárva hozzuk létre a mágneses teret. Az állandó mágneses állórész egyszerűbb és olcsóbb, míg az elektromágneses állórész erősebb mágneses teret tud létrehozni, ezáltal növelve a motor teljesítményét.
A forgórész (armatúra) egy tekercselt huzalból álló henger, mely a mágneses térben forog. A tekercs végei egy kommutátorhoz kapcsolódnak. A kommutátor egy forgó kapcsoló, mely a keféken keresztül kapja az áramot. A kefék általában szénből készülnek, és az áramot a kommutátorra vezetik, így biztosítva a forgórész folyamatos áramellátását.
A DC motor működésének lényege a Lorentz-erő. Amikor áram folyik a forgórész tekercsében, a mágneses tér erőhatást fejt ki az áramvezetőre. Ez az erő forgatónyomatékot hoz létre, amely elkezdi forgatni a rotort. A kommutátor feladata, hogy a rotor forgása közben a tekercsben folyó áram irányát megfordítsa, így biztosítva, hogy a forgatónyomaték mindig azonos irányba mutasson, és a motor folyamatosan forogjon.
A forgórész tekercsében folyó áram és az állórész által létrehozott mágneses tér kölcsönhatása hozza létre a forgatónyomatékot, ami a DC motor forgását eredményezi.
A DC motorok fordulatszáma és nyomatéka az áram erősségének és a mágneses tér erősségének szabályozásával vezérelhető. Minél nagyobb az áram, annál nagyobb a forgatónyomaték és annál gyorsabb a motor forgása. A DC motorok széles körben elterjedtek, megtalálhatók játékokban, háztartási gépekben, autóipari alkalmazásokban és sok más területen.
A DC motorok típusai: Soros, párhuzamos és vegyes gerjesztésű motorok
A DC motorok világa nem ér véget az egyszerű felépítésnél. A gerjesztés módja alapján többféle típust különböztetünk meg, melyek mindegyike más-más tulajdonságokkal rendelkezik, és különböző alkalmazásokra ideális.
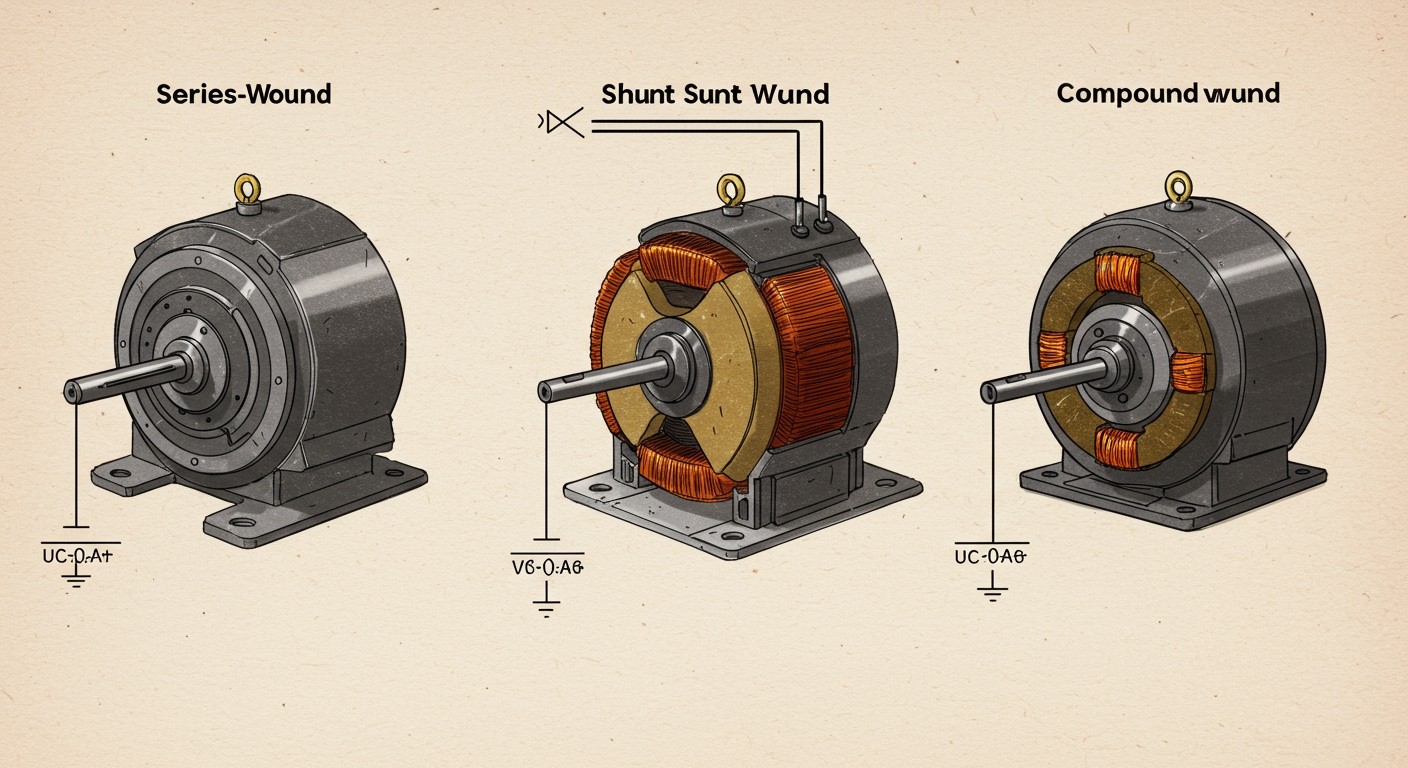
Soros gerjesztésű motorok: Ebben a típusban a gerjesztő tekercs sorba van kötve a forgórész tekercsével. Ez azt jelenti, hogy ugyanaz az áram folyik át mindkettőn. A soros motorok nagyon nagy indítónyomatékkal rendelkeznek, ami ideálissá teszi őket olyan alkalmazásokban, mint például a daruk vagy a villamos mozdonyok. Viszont a terhelés csökkenésével a fordulatszámuk veszélyesen megnőhet, ezért terhelés nélkül nem szabad üzemeltetni őket!
Párhuzamos gerjesztésű motorok: Ezzel szemben a párhuzamos gerjesztésű motoroknál a gerjesztő tekercs párhuzamosan van kötve a forgórész tekercsével. Ennek köszönhetően a fordulatszámuk sokkal stabilabb, kevésbé függ a terheléstől. Ez a típus kiválóan alkalmas olyan alkalmazásokra, ahol állandó fordulatszámra van szükség, például szerszámgépek vagy ventilátorok meghajtására.
Vegyes gerjesztésű motorok: Ahogy a nevük is sugallja, a vegyes gerjesztésű motorok a soros és a párhuzamos gerjesztés előnyeit ötvözik. Rendelkeznek mind soros, mind párhuzamos gerjesztő tekerccsel. A soros tekercs a nagy indítónyomatékot biztosítja, míg a párhuzamos tekercs a stabilabb fordulatszámot. A tekercsek arányának változtatásával a motor jelleggörbéje finomhangolható az adott alkalmazáshoz.
A DC motorok típusai a gerjesztés módjában különböznek, ami jelentősen befolyásolja a motor nyomaték-fordulatszám karakterisztikáját és ezáltal az alkalmazhatóságát.
A váltóáramú (AC) motorok felépítése és működése
A váltóáramú (AC) motorok a legelterjedtebb motorfajták az iparban és a háztartásokban is. Működésük alapja az, hogy a váltakozó áram által létrehozott forgó mágneses mező hatására a motor forgórésze (rotor) forogni kezd.
Felépítésüket tekintve két fő részből állnak: a statorból (állórész) és a rotorból (forgórész). A stator egy rögzített rész, amely tekercsekből áll. Ezek a tekercsek a váltakozó áram hatására mágneses mezőt hoznak létre.
A rotor a motor forgó része. Két fő típusa létezik: a kalickás rotor és a tekercselt rotor. A kalickás rotor egy egyszerű, robusztus szerkezet, amely alumínium vagy réz rudakból áll, rövidre zárva a végeken. A tekercselt rotor tekercsekkel rendelkezik, melyeket külső áramkörhöz lehet csatlakoztatni, ezáltal szabályozhatóbbá téve a motor működését.
A váltóáramú motorok működése a következőképpen zajlik: A stator tekercseibe táplált váltakozó áram forgó mágneses mezőt generál. Ez a mező indukál áramot a rotorban (a kalickás rotor rudazatában, vagy a tekercselt rotor tekercseiben). Az indukált áram és a mágneses mező kölcsönhatása nyomatékot hoz létre, ami a rotort forgásra készteti.
A rotor sebessége szinte mindig alacsonyabb, mint a forgó mágneses mező szinkronsebessége. Ezt a különbséget szlipnek nevezzük, és elengedhetetlen a nyomaték létrehozásához.
Fontos megjegyezni, hogy a váltóáramú motorok többféle kivitelben léteznek, attól függően, hogy egyfázisú vagy háromfázisú árammal működnek. A háromfázisú motorok általában hatékonyabbak és nagyobb teljesítményűek, mint az egyfázisúak.
A váltóáramú motorok előnyei közé tartozik a egyszerű felépítés, a nagy megbízhatóság és a viszonylag alacsony költség. Hátrányuk lehet a nehezebb fordulatszám-szabályozás a hagyományos kivitelekben, bár a frekvenciaváltókkal ez a probléma áthidalható.
A váltóáramú motorok széles körben használatosak szivattyúk, ventilátorok, kompresszorok, szállítószalagok és még sok más alkalmazásban.
Aszinkron motorok: A forgórész működési elve
Az aszinkron motorok forgórésze – a szinkron motorokkal ellentétben – nem tartalmaz állandó mágnest, sem pedig közvetlen elektromos csatlakozást a hálózathoz. Ehelyett a forgórészben áram indukálódik, ami aztán mágneses teret hoz létre.
A működés lényege az, hogy az állórész tekercseiben folyó váltóáram egy forgó mágneses teret hoz létre. Ez a forgó mágneses tér „vágja” a forgórész vezetőit (általában alumínium vagy réz rudakat, amelyeket rövidre zártak). Emiatt a Faraday-féle indukciós törvény értelmében a forgórészben feszültség indukálódik.
Mivel a forgórész rövidre van zárva, a feszültség hatására áram kezd folyni a vezető rudakban. Ez az áram ismét mágneses teret generál, ami kölcsönhatásba lép az állórész által létrehozott forgó mágneses térrel.
Ennek a kölcsönhatásnak az eredménye az, hogy a forgórész elkezd forogni, követve az állórész által generált forgó mágneses teret. Fontos megjegyezni, hogy a forgórész sosem éri el az állórész forgó mágneses terének pontos sebességét (szinkron sebességét), mert akkor nem lenne relatív mozgás, és nem indukálódna áram a forgórészben. Ezt a sebességkülönbséget nevezzük szlipnek.
A szlip biztosítja, hogy a forgórészben folyamatosan indukálódjon áram, és ezáltal a motor nyomatékot tudjon kifejteni.
A forgórész típusa (pl. kalickás vagy tekercselt) befolyásolja a motor tulajdonságait, például a nyomatékot és a hatásfokot. A kalickás forgórész egyszerűbb és robusztusabb, míg a tekercselt forgórész lehetővé teszi a külső ellenállások beiktatását, ami a motor indításakor kedvezőbb nyomatékot eredményez.
Az aszinkron motorok széles körben elterjedtek ipari alkalmazásokban, háztartási gépekben és közlekedési eszközökben is, főként egyszerűségük, megbízhatóságuk és viszonylag alacsony költségük miatt.
Szinkron motorok: A forgórész szinkronban tartása a mágneses mezővel
A szinkron motorok működése abban rejlik, hogy a forgórészük szinkronban forog a gerjesztő mágneses mezővel. Ez azt jelenti, hogy a forgórész fordulatszáma pontosan megegyezik a hálózati frekvencia által meghatározott szinkron fordulatszámmal. Ezzel szemben az aszinkron motoroknál a forgórész mindig egy kicsit „lemarad” a szinkron fordulatszámtól.
A szinkron motorok forgórésze lehet állandó mágneses vagy gerjesztő tekercsekkel ellátott. Az állandó mágneses változat egyszerűbb, de kevésbé szabályozható. A gerjesztő tekercsekkel ellátott változatnál a gerjesztő áram szabályozásával a motor teljesítménye és jelleggörbéje befolyásolható.
A szinkron motorok legfontosabb jellemzője, hogy a terhelés változásával sem változik a fordulatszámuk, amíg a terhelés a motor névleges nyomatékán belül marad.
A szinkron motorok indítása bonyolultabb, mint az aszinkron motoroké. Mivel a forgórésznek azonnal szinkronba kell kerülnie a forgó mágneses mezővel, speciális indítási módszereket alkalmaznak. Ezek közé tartozik a Prony-fékes indítás, a frekvenciaváltós indítás, vagy a dámper tekercsek használata, melyek az indítás pillanatában aszinkron motorként működtetik a motort.
A szinkron motorokat gyakran használják olyan alkalmazásokban, ahol pontos fordulatszám-szabályozás szükséges, például szivattyúk, kompresszorok, vagy szalagrendszerek meghajtásában. Emellett a hálózat meddő teljesítményének kompenzálására is alkalmasak, ami javítja a hálózat hatásfokát.
Speciális motorok: Léptetőmotorok, szervomotorok, BLDC motorok
A hagyományos elektromos motorokon túl létezik egy sor speciális motor, melyek célzott alkalmazásokra lettek kifejlesztve. Ezek közé tartoznak a léptetőmotorok, szervomotorok és a kefe nélküli DC (BLDC) motorok.
Léptetőmotorok: Ezek a motorok nem folyamatosan forognak, hanem meghatározott lépésekben. A motor tengelye egy fix szöggel fordul el minden egyes impulzusra. Ezt a tulajdonságukat a precíz pozícionálást igénylő alkalmazásokban használják ki, mint például a 3D nyomtatókban, CNC gépekben és robotikában. A léptetőmotorok pontosságuk miatt igen népszerűek, hiszen a lépésszög pontosan kontrollálható. Két fő típusuk létezik: a permanens mágneses és a variábilis reluktancia típusok.
Szervomotorok: A szervomotorok visszacsatolást használnak a pozíció, sebesség vagy nyomaték pontos szabályozására. Egy beépített szenzor (általában egy enkóder) folyamatosan méri a motor tengelyének helyzetét, és ezt az információt visszaküldi a vezérlőnek. A vezérlő ezután korrigálja a motor működését, hogy az elérje a kívánt értéket. A szervomotorokat gyakran használják robotkarokban, repülőgép vezérlőfelületeiben és más olyan alkalmazásokban, ahol nagy pontosság és dinamikus válaszidő szükséges.
BLDC motorok (Kefe nélküli DC motorok): A BLDC motorok a hagyományos DC motorok továbbfejlesztett változatai. A legfontosabb különbség, hogy nincsenek bennük kefék. A kommutációt elektronikusan oldják meg, ami nagyobb hatásfokot, hosszabb élettartamot és kevesebb karbantartást eredményez. A BLDC motorok erősek és csendesek, ezért megtalálhatók a drónokban, elektromos autókban és háztartási gépekben is.
A lényeges különbség a speciális motorok és a hagyományos motorok között, hogy a speciális motorok célzott alkalmazásokra lettek optimalizálva, és gyakran tartalmaznak visszacsatolási rendszereket a pontos vezérlés érdekében.
Mindhárom motor típus más-más előnyökkel rendelkezik, így a megfelelő motor kiválasztása az adott alkalmazás igényeitől függ. Fontos figyelembe venni a pontosságot, a sebességet, a nyomatékot, a hatásfokot és a karbantartási igényeket a döntés során.
Az elektromos motorok vezérlése: Fordulatszám- és nyomatékszabályozás
Az elektromos motorok vezérlése kulcsfontosságú a hatékony és pontos működéshez. A fordulatszám és a nyomaték szabályozása lehetővé teszi, hogy a motor a kívánt teljesítményt nyújtsa a különböző alkalmazásokban. Több módszer is létezik ezeknek a paramétereknek a befolyásolására, melyek a motor típusától és a vezérlési igényektől függenek.
A fordulatszám szabályozása az egyik legfontosabb szempont. Egyenáramú (DC) motoroknál ez egyszerűen a tápfeszültség változtatásával érhető el. Minél nagyobb a feszültség, annál gyorsabban forog a motor. Azonban ez a módszer nem feltétlenül hatékony, különösen nagyobb terhelés esetén. Korszerűbb megoldás a PWM (Pulse Width Modulation) technológia alkalmazása, amellyel a feszültség átlagértékét szabályozzuk gyors be- és kikapcsolásokkal. Ez finomabb és hatékonyabb fordulatszám szabályozást tesz lehetővé.
Váltakozó áramú (AC) motoroknál, különösen az indukciós motoroknál, a fordulatszám a frekvenciával arányos. A frekvenciaváltók (inverterek) lehetővé teszik a tápfeszültség frekvenciájának változtatását, ezáltal a motor fordulatszámának pontos beállítását. Ez a módszer széles körben elterjedt az ipari alkalmazásokban.
A nyomaték szabályozása közvetlenül összefügg az áramerősséggel. Minél nagyobb az áramerősség a motor tekercseiben, annál nagyobb a nyomaték. A vezérlőrendszerek az áramerősség szabályozásával tudják befolyásolni a motor által kifejtett erőt. Fontos, hogy az áramerősség ne haladja meg a motor névleges értékét, mert az túlmelegedéshez és károsodáshoz vezethet.
A legfontosabb szempont a fordulatszám- és nyomatékszabályozás során a motor biztonságos és hatékony működésének biztosítása. Ez komplex vezérlési algoritmusokat és szenzorokat igényel, amelyek folyamatosan figyelik a motor paramétereit és szükség esetén korrigálják a vezérlést.
A modern motorvezérlők visszacsatolásos rendszereket használnak. Ez azt jelenti, hogy a vezérlő folyamatosan méri a motor tényleges fordulatszámát és nyomatékát, és összehasonlítja a kívánt értékekkel. A különbség alapján a vezérlő korrigálja a motor tápfeszültségét vagy frekvenciáját, hogy a motor a kívánt módon működjön.
Összefoglalva, a fordulatszám- és nyomatékszabályozás elengedhetetlen az elektromos motorok hatékony és sokoldalú alkalmazásához. A különböző vezérlési módszerek lehetővé teszik, hogy a motor a legkülönbözőbb feladatokhoz alkalmazkodjon, a precíz robotikai mozgásoktól kezdve a nagy teljesítményű ipari gépek működtetéséig.
Az elektromos motorok hatásfoka és energiaveszteségei
Az elektromos motorok hatásfoka sosem éri el a 100%-ot. Ez azt jelenti, hogy a motorba táplált elektromos energia egy része nem mechanikai munkává alakul, hanem hővé, zajá, vagy más formájú veszteséggé alakul át. A hatásfok a leadott mechanikai teljesítmény és a felvett elektromos teljesítmény hányadosa, általában százalékban kifejezve.
Számos tényező befolyásolja a motor hatásfokát. Ezek közé tartoznak:
- Rézveszteségek: Az áram átfolyása a tekercseken hőt termel (I2R veszteség). Minél nagyobb az áram és minél nagyobb a tekercsek ellenállása, annál nagyobb a veszteség.
- Vasveszteségek: A váltakozó mágneses tér a motor vasmagjában hiszterézis és örvényáramok miatt hőt termel.
- Mechanikai veszteségek: A csapágyak súrlódása, a szélzaj és a szellőzés is energiát emészt fel.
- Kóbor terhelési veszteségek: Ezek a veszteségek összetettek és nehezen mérhetőek, általában a motor tervezéséből és gyártásából adódnak.
A motor terhelése is jelentős hatással van a hatásfokra. Általában a motor legjobb hatásfokát a névleges terhelés közelében éri el. Alacsony terhelésen a veszteségek aránya nagyobb, így a hatásfok csökken. Túlzott terhelés esetén pedig a rézveszteségek megnőnek, ami szintén rontja a hatásfokot.
A magasabb hatásfokú motorok kevesebb energiát fogyasztanak ugyanazon munkavégzéshez, ami hosszú távon jelentős költségmegtakarítást eredményezhet, és csökkenti a környezeti terhelést.
A motorok energiaveszteségeinek minimalizálására többféle módszer létezik, például jobb minőségű anyagok használata, optimalizált tekercselés, és hatékonyabb hűtési rendszerek alkalmazása. A frekvenciaváltók alkalmazása lehetővé teszi a motor fordulatszámának szabályozását a terheléshez igazítva, ami szintén javíthatja a hatásfokot.
Az elektromos motorok karbantartása és hibaelhárítása
Az elektromos motorok hosszú élettartamának és megbízható működésének kulcsa a rendszeres karbantartás. A megelőző karbantartás sokkal olcsóbb és kevésbé időigényes, mint a váratlan hibák javítása. Nézzük, mire kell figyelni!
- Tisztítás: A motor környezetét rendszeresen tisztítsuk meg a portól, szennyeződésektől. A por lerakódása túlmelegedéshez vezethet.
- Kenés: A csapágyak megfelelő kenése elengedhetetlen. Ellenőrizzük a kenőanyag szintjét és szükség esetén töltsük fel. A régi, elhasználódott kenőanyagot cseréljük le.
- Szellőzés ellenőrzése: Győződjünk meg arról, hogy a motor szellőzőnyílásai nincsenek eltömődve. A megfelelő szellőzés biztosítja a motor hűtését.
- Elektromos csatlakozások: Ellenőrizzük a csatlakozások szorosságát és épségét. A laza vagy korrodált csatlakozások feszültségeséshez és túlmelegedéshez vezethetnek.
- Vibráció ellenőrzése: Figyeljük a motor vibrációját. A túlzott vibráció csapágyhibára vagy kiegyensúlyozatlanságra utalhat.
A hibaelhárítás során fontos a szisztematikus megközelítés. Először a legegyszerűbb dolgokat ellenőrizzük, majd haladjunk a bonyolultabbak felé.
- Ellenőrizzük a tápellátást: Győződjünk meg arról, hogy a motor megkapja a megfelelő feszültséget és áramot.
- Vizsgáljuk meg a tekercseket: Egy multiméter segítségével ellenőrizzük a tekercsek szakadását vagy rövidzárlatát.
- Teszteljük a kondenzátort (ha van): A kondenzátor hibája indítási problémákat okozhat.
- Ellenőrizzük a csapágyakat: A zajos vagy akadozó csapágyak cserére szorulhatnak.
A hibaelhárítás során fontos a biztonság. Mindig kapcsoljuk ki a motort a hálózatról, mielőtt bármilyen munkálatba kezdenénk. Ha nem vagyunk biztosak a dolgunkban, forduljunk szakemberhez.
A rendszeres karbantartás nem csak meghosszabbítja a motor élettartamát, hanem csökkenti a váratlan leállások kockázatát is, ami jelentős költségmegtakarítást eredményezhet.
Ne feledjük, hogy az elektromos motorok karbantartása és hibaelhárítása szakértelmet igényelhet. Ha bizonytalanok vagyunk, kérjük szakember segítségét. A helytelen javítás súlyos károkat okozhat a motorban, vagy akár balesetveszélyes is lehet.

















